After about a week of beta testing, Copter-3.6.4 has been released as the official default firmware for multicopters and helicopters and should appear in the ground stations within the next hour or two. The changes are in the ReleaseNotes and also copied below:
Bug fixes and minor enhancements
a) Detect and clear stuck I2C bus when using ChibiOS. May help some Radiolink TS100 GPS/compass module users
b) Pixhawk4 fix for battery monitor voltage scaling
c) TradHeli Dual (aka Chinook) fix for scaling of second swashplate movement
d) Omnibus F7 IMU orientation fix
e) Gimbal fix to avoid extreme movement if pilot’s transmitter is off at startup
f) Follow mode fix to obey FOLL_SYSID parameter (controls which vehicle to follow)
I have to point out that the BlHeli_S passthrough still doesn’t works (just tried) in this release and I cannot see any mention in the above known issues.
Please report back if you can’t make evidence of this “still ignored known issues”
Thanks
Hello. I can not solve the problem with the display of current in a mission glider. I have a variety of power modules, the original 3dr, chinese, holybro. Voltage all shows well. The current or the same value shows, or significantly less than required. Shows in the range of 0.2-0.5 for example. I do everything I calibrate and do according to the instructions. I do not know what to do.
What is the setup process for switching over to ChibiOS from NuttX if I decide to? I just upgraded to the 3.6.4 firmware on my Cube, but I like the new fix for the stuck i2c bus in chibiOS that you mentioned (as I also had what I believed to be an i2c issue with my lidar last week where it stopped holding altitude)
Do I need to retune my copter or do anything special if I re-upload the 3.6.4 firmware and switch to Chibi OS?
@Iron_Donkey, I slightly enhanced the “Loading Firmware to Pixhawk boards” wiki page a few weeks ago to add the part about loading ChibiOS vs NuttX but in any case, if using the MP, switching between the NuttX and ChibiOS version should simply be a matter of answering the question when MP pops it up during the loading process. Most users will not notice any difference in behaviour and no special actions or re-tuning are required. No parameters are wiped… it should all be pretty seamless.
Hi Lee,
I’ve just check with MP and I’ve found 2 versions that works for the BlHeli_S passthrough, the string plotted by MP after connection is the only firmware version I’m able to give you:
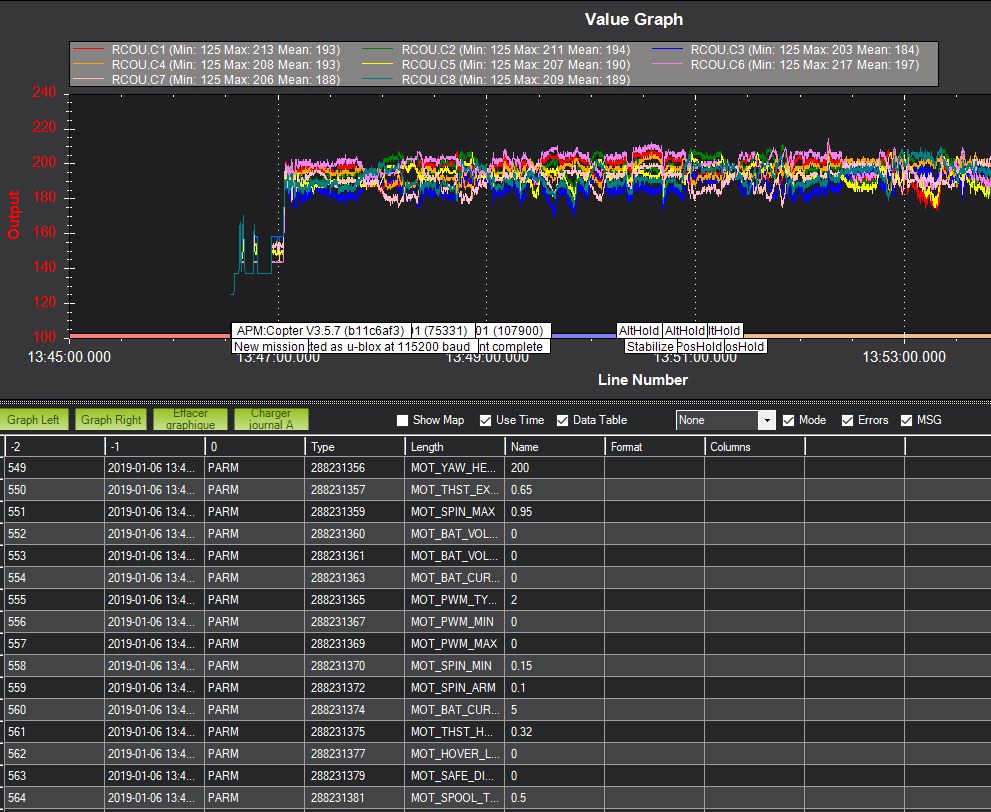
ArduCopter V3.6-dev (6185d288) some minor issues ArduCopter V3.6-dev (a0d874ba) this one seems to works even better
Hello, I recently got a PixracerR-15 from mRo for a y-6 copter build and noticed my Spektrum AR7700 and the DX8 will not communicate to Mission Planner in ChibiOS, Radio is binded but no green bars in Ground control software … as a test I flashed current firmware Nuttx and the Spectrum equipment connected fine. Can we add this to the issues for review?
I am encountering problems with radio calibration. When I calibrate the TRIM values on many of the RC channels are set too low i.e. between ~800 and ~950 resulting in warning about trim being lower than min. I had to go in and manually set the trim values to 1500, which may not be optimal.
I am using Taranis X9D plus running open tx version 2.2.2
I was told that I should get the testing firmware by using " CTRL Q" and not through MP Beta Firmware button is this right? I seem to be using ArduCopter V3.7.0-dev (99120cdd).