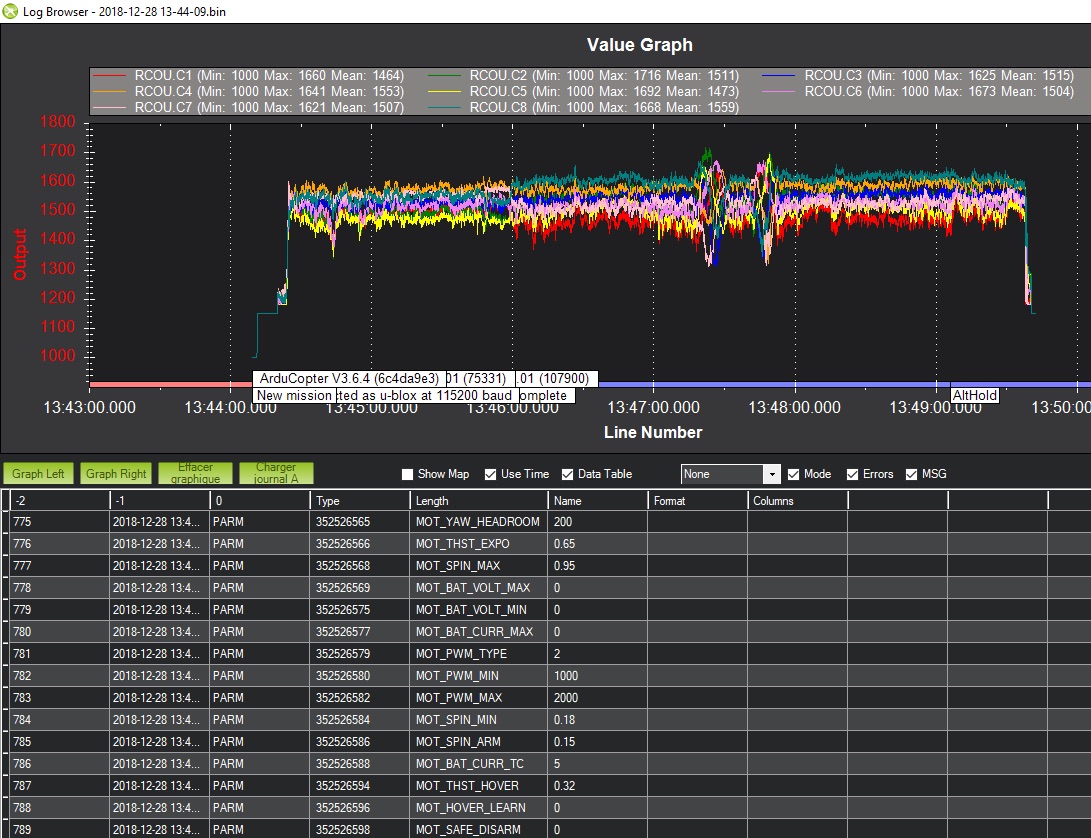
With Arducopter 3.6.X, I had a try with Oneshot125. My card is a Navio2. No way to enable Oneshot125. PWM type is set at 2 in parameters, but PWM output (RCOU to motors) is still in the range 1000-2000.
the logging is always done in the 1000 - 2000 pwm range, this is whats used internally in Arducopter, it is then converted to whatever protocol afterwards.
hum, I have logs of dshot and it is still in the 1000 - 2000 range. and also possibly oneshot although i would have to check. So you issue is oneshot is not working? but used to be with the same parameters?
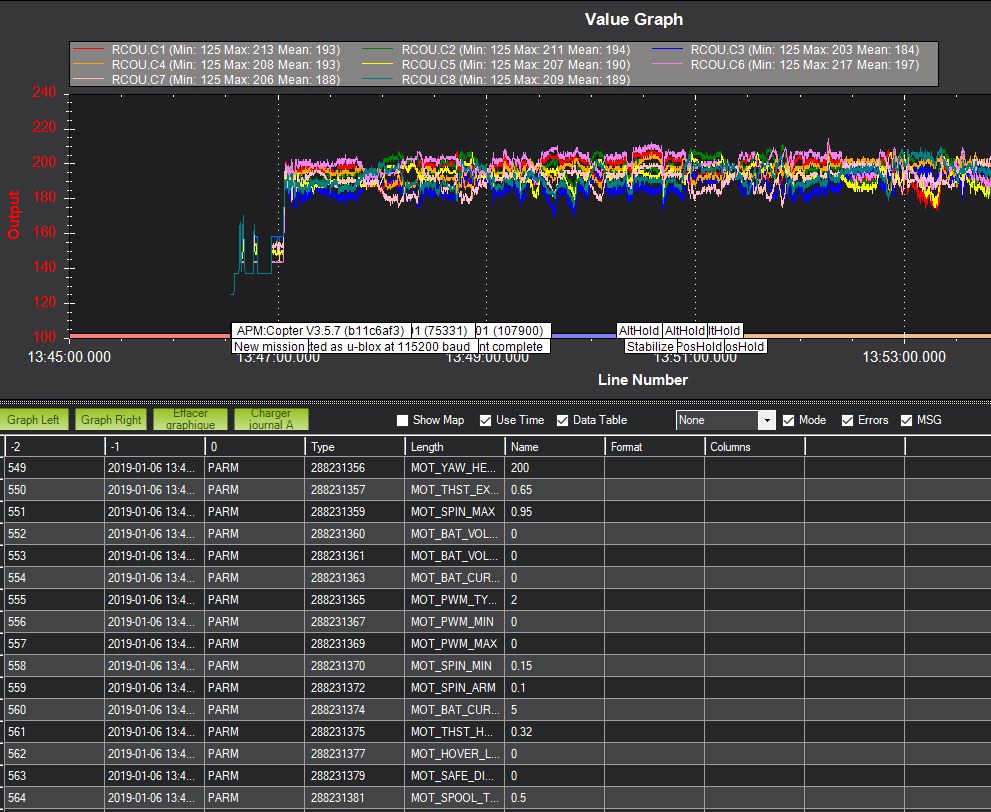
Some results with 3.7.0 from Master and Mission Planner updated to latest Beta.
Oneshot or Oneshot125: nothing new (visible),
DShot150 (Min and Max are set to 1000-2000 by default). I applied the setting to check the function. I do not intend to fly it, the configuration is not all completed (just frame config).
RMK: SERVO_BLH parameters are relative to ChiBios,
your right, I had not registered that you were not using ChibiOS. I have no idea whats going on, looks like all your parameters are sensible. Can you open a issue here.
In the mean time you should be able to use standard pwm I guess.