ChibiOS rc-5 on the mRo in gps mode is jerky see video: GPS switched on at 00:13
" https://www.dropbox.com/s/0sftgcd4s5htqz8/GPS-jerking-chi.mp4?dl=0 "
logs ChibiOS and Nuttx nuttx is fine.
ChibiOS rc-5 on the mRo in gps mode is jerky see video: GPS switched on at 00:13
" https://www.dropbox.com/s/0sftgcd4s5htqz8/GPS-jerking-chi.mp4?dl=0 "
logs ChibiOS and Nuttx nuttx is fine.
Downloading logs in RC-5 gives false flags errors. Nav check, Bad ARS, and Pos vert in HUD.
Dave,
That is a bit of a concern. There was a change related to the compasses. It was meant to be a non-functional change but perhaps something went wrong. Txs for the report. I think we should be able to reproduce with a pixracer but we may need a dataflash log file from you…
Brandon,
Txs for the report. re EKF errors during dataflash log downloads, I think that happens in Copter-3.5 as well. It’s potentially something we should fix but we may not fix it in Copter-3.6.
Randy,
Flight log attached from a brief hover as it wasn’t stable in assisted modes.
Edit: I flashed back to 3.5.5 Nuttx as it wasn’t flyable on 3.6.0Rc5 Chibios and the compass’s are properly recognized and calibrate OK.
@Quadzilla many thanks for reporting the issue with the mRo X2.1. I’ve reproduced the issue and fixed it in master and for copter 3.6.
I’ve done a build here for you to test:
http://uav.tridgell.net/quadsours/copter-mRoX21-beta-test.apj
Thanks!
Thanks so much will test it!
Quick test on my quad using Pixhawk classic flight controler few increible! ChibiOS rc-5 Thanks!
Gal,
Thanks for the report, I’ve added it to our list to investigate.
Hi happy to report that the Green frog is AOK using ChibiOS copter-mRoX21-beta-test.apj you made me! and is working really nice !! floats like a dream!! Big thank you and Randy as well!

Great, thanks for testing so quickly! This will be included in Copter-3.6.0-rc6 which will be out within a week I think.
report:
Quad nose dived in takeoff and crashed.
IronMan 650 Sport
400kv
ESC XRotor Pro 50A
3.6.0-rc5 Pixhawk 4
stabilize mode.
When I started the takeoff all seemed stable, but at about 3 feet the quad took a nose dive and landed on its back. Ended up with only one broken antenna.
Actually I have a hunch that the cause is due to mechanical failure but I’m not sure. I am not proficient enough in reading the logs so any input would be appreciated.
2018-07-12 2007-48-42.bin
2018-07-12 2007-48-42.log
2018-07-12 2007-48-42.log.param
video
Best,
Gal
Gal,
It looks like the vehicle was in Acro mode, that was intentional?
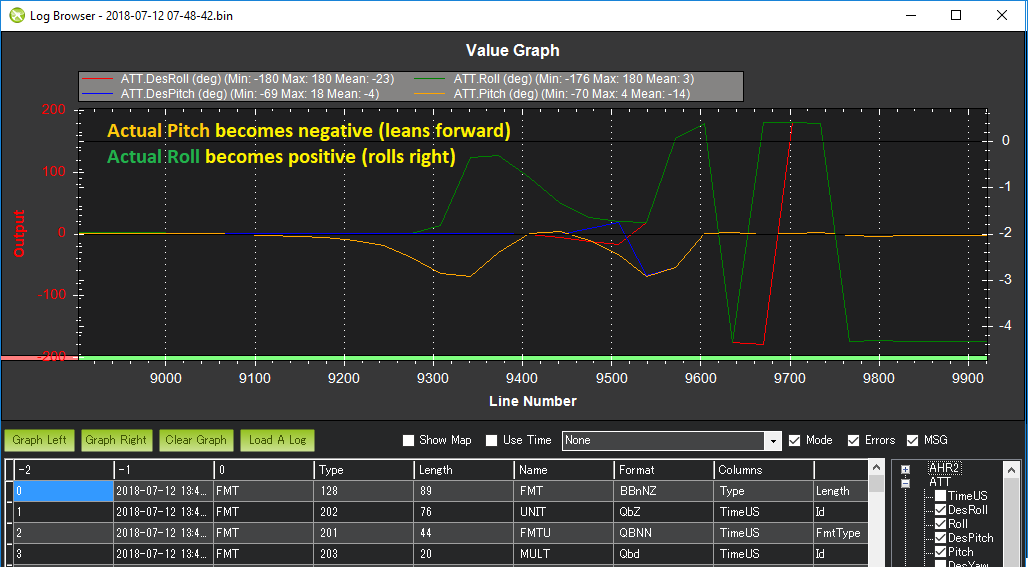
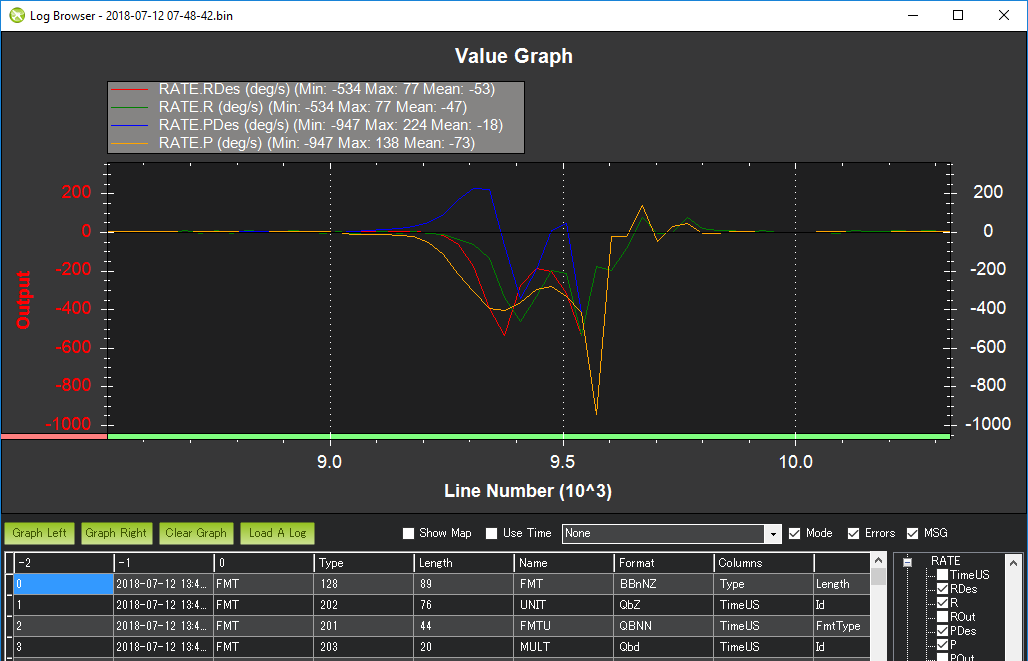
In any case, it does look like some kind of configuration error or a mechanical failure although it’s hard to be sure exactly what the issue is. Certainly the pitch forward is not commanded because the desired roll and pitch angles and rates are staying reasonable. The actual pitch rate and actual pitch angle separate from the desired though.
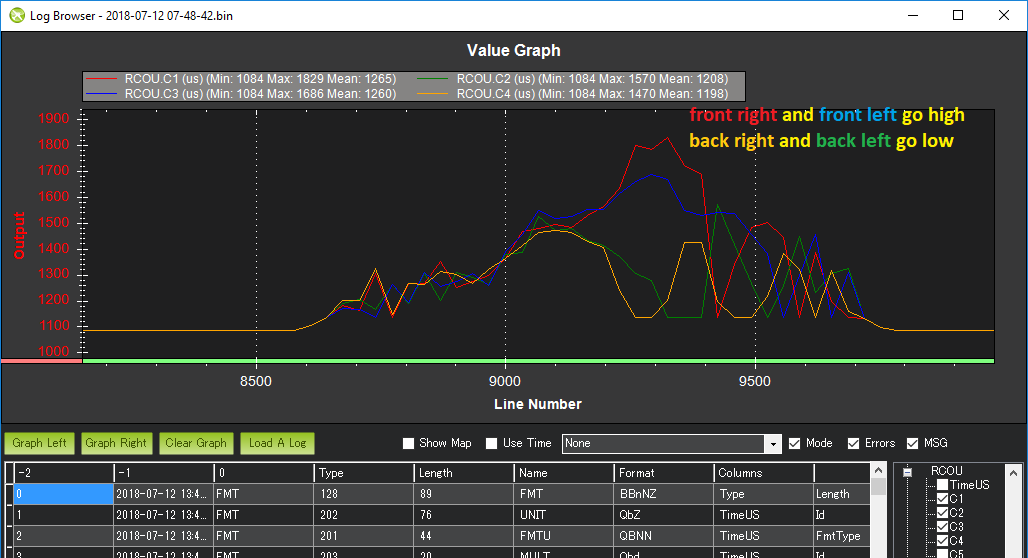
What makes it look like a mechanical failure is as the vehicle is leaning forward the forward left and right motors go high but this does not stop the vehicle from pitching forward.
Of course you’ve flown this vehicle before and if not you’ve checked the motor ordering and propeller direction using the motor test feature?
Hi all,
Today I installed version 3.6.0-rc5 on an OmnibusF4-V3 board and everything seems to work but the battery monitor. The board is equiped with a current sensor. How do I set up my Battery Monitor so my flight data show battery voltage and current?
Best regards,
Jan Willem, The Netherlands
Look at this thread- has ChibiOS specific info
.
https://www.rcgroups.com/forums/showthread.php?3102183-Most-Integrated-Ardupilot-Flight-Controller-(ChiBios)
Joe
Thanks for your reply Joe, that thread had the solution!
I set my bat_volt_pin to 12 and my bat_curr_pin to 11.
Best regards,
Jan Willem
@JoeBreznai, @Jan_Willem, thanks for that!
I’ve created an issue and I expect we will fix the defaulting of these pins in a follow up release candidate.
EDIT: these changes were already included in -rc5 so it’s not clear why @Jan_Willem had to set them manually. Jan, you were definitely using -rc5? Is it possible you had changed those parameters before?
Hi, is there any plan or possibility to add support for the Matek F722 board?
Problem with Safety Switch…
Hi,
I just upgraded from 3.4.4 to 3.6 rc5 and after configuring it, when I connect the battery one motor start while the safety switch led is blinking. Safety switch bottom need new param for work in 3.6?
Auto-Answer: Reflashing again and work 
But, i have a new problem testing motors…
Using Pixhawk 2.4.8 (PX4-v2) firmware 3.6.0-rc5 hexa, when i do motor test, only work 4 motors of 6. Parameter FRAME_CLASS=2 and FRAME_TYPE=1, need modify more params or downgrade 3.4.4 and flash again?
Auto-Answer: http://ardupilot.org/copter/docs/common-rcoutput-mapping.html
Hi all,
I’m running Arducopter V3.6.0-rc5 on an OmnibusF4Pro-V3 board and logging doesn’t seem to work.
With several uSD cards differing in capacity and speed I get the same message: PreArm: Logging Failed.
I’m only able to arm when I disable the arm_check for logging and set my loggin_backend to zero.
Is this a known issue, or did someone succesfully log on this board?
Best regards,
Jan Willem, The Netherlands