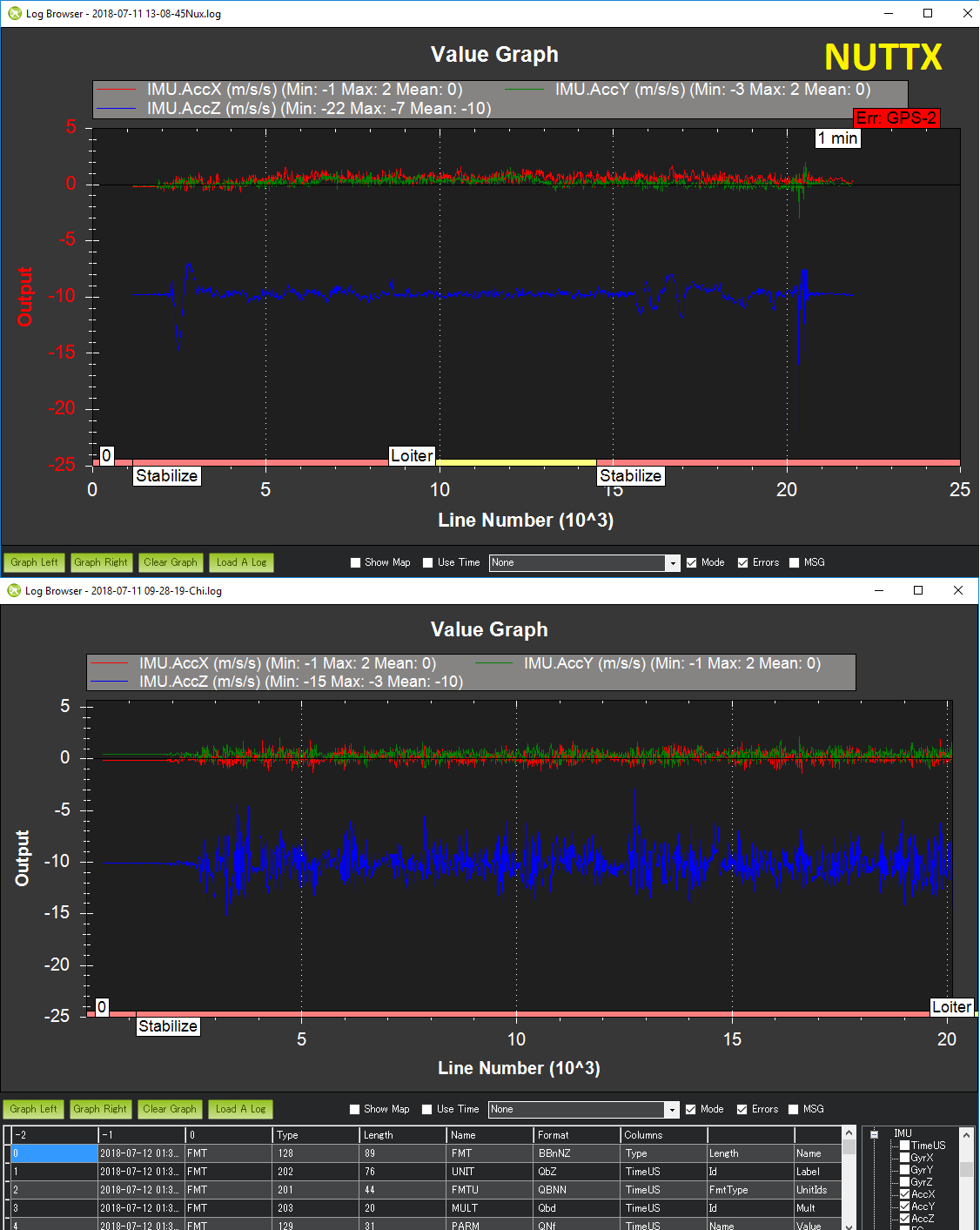
This is a new thread to discuss the issues that @Quadzilla has seen with jumpy Loiter when using ChibiOS. A video of the behaviour is here at 00:13 and logs of a ChibiOS flight and NuttX flight are here.
I’ve checked the logs and here is what I see:
- the parameters are identical across the two flights except the INS_GYR_ID is 2360330 (MPU9250) on ChibiOS and 2163210 (MPU6000) on Nuttx. I think this means that ChibiOS may not be using the correct MPU9250’s gyro.
- the Z-axis accelerometer values (from the IMU) seem really high on the ChibiOS board and this is clearly the cause of the jumpy motors when in Loiter mode.
@tridge and I are investigating more…