02 - Quadcopter Frame Types
(each main blog post has a number and title to set it apart from replies and comments)
I want to make this blog educational for beginners as well as appealing to the seasoned pros who’ve been doing this longer than I have. If you see any mistakes in my math, please let me know! 
First, I wanted to illustrate the differences in the basic frame types you can build yourself. I’ll cover more complicated stuff in a bit.
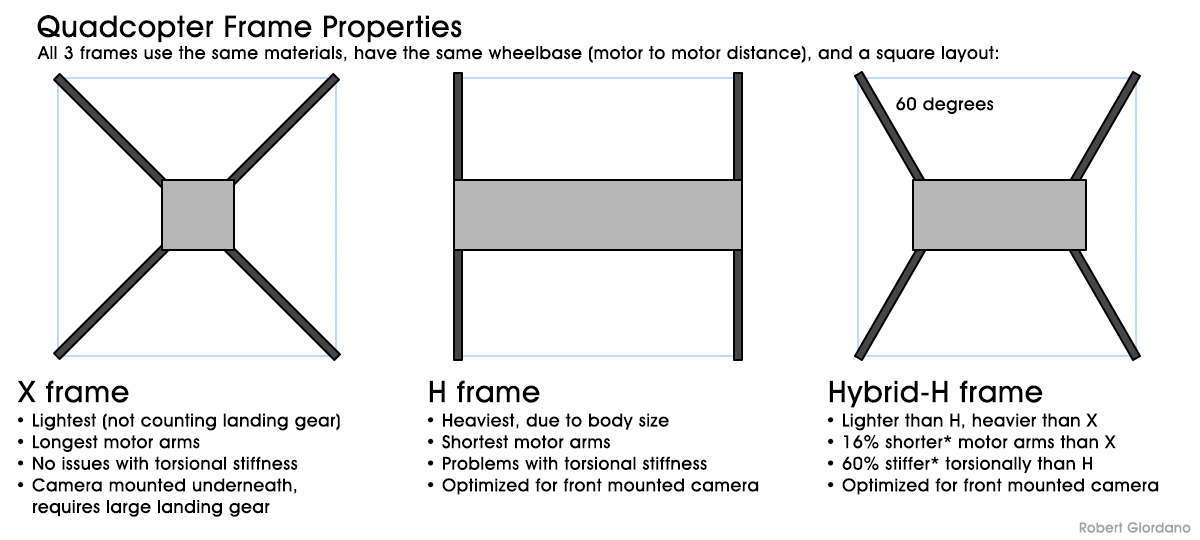
X Frame
This is probably the most popular and common frame type in the DIY world and its the easiest to build. All other things being equal, it will be the lightest frame. The thing is, you’ll be hanging the camera underneath the center and it has to hang low enough so you don’t see propellers when its pointing forward. If you plan to point your camera down most of the time, or it doesn’t matter if you see propellers in your video, then an X Frame might be the best for you.
If you don’t want to see propellers in your video, then you’ll need some fairly long landing gear so your camera doesn’t hit the ground on takeoff and landing. The problem is, the landing gear needs to be fairly strong to support the weight of everything else, so it becomes heavy. The weight of your landing gear can easily cancel any weight savings you get from the X design.
This frame will have the longest arms, compared to the other two frames and as I recently tested, longer arms are more prone to bending, and they act as levers in a crash. The longer the lever, the more force it exerts on the end where it connects to the body.
H Frame
The H frame will be the heaviest (not counting landing gear) because of the size of the body. Yes, you can use carbon fiber plates but even if you have access to a CNC router and cut out a bunch of holes in each plate, it will still be heavier than the X tubes.
The next problem you have with an H frame is torsional stiffness. I’ll explain this in more detail later but basically its the front of the quad trying to rotate against the rear of the quad. Take a drinking straw and hold one end in each hand between your thumb and forefinger. Now turn one hand like you’re unscrewing something. The straw will twist and crinkle because it has no torsional stiffness. Now try the same thing with a pencil. It is torsionally stiff, but its also a lot heavier than a straw. H frames are notoriously bad when it comes to torsional stiffness. Usually, you have to add so much weight to stiffen it that it isn’t worth it.
The arms on an H frame will be the shortest and are actually its strong point. As you might recall from geometry, the length of the H arm will be the length of the X arm * 1.4142 / 2 (the square root of 2, divided by 2). For example, if the arms on your X frame are 300mm long, they would only be 212mm (300 * 1.4142 / 2 = 212.13) on an H with the same motor spacing.
Obviously, the H frame is optimized for front mounted cameras. Because the camera doesn’t hang down underneath the frame, you don’t need large, heavy landing gear. Sometimes you can get away with no landing gear at all!
Hybrid H Frame
Now that we’ve seen the pros and cons of the X and H, lets compromise and have it all. Setting the arms at 60 degrees allows the body to be shortened by 60%. Right away you have a body that’s 60% lighter than the H, assuming they’re both made from the same materials. Also, torsional stiffness increases linearly as length decreases. A body that’s 60% shorter is 60% stiffer!
The arms of the Hybrid H will be longer than the H but still shorter than the X. If you really want to know the difference, we can use h/SIN(a) where h=the length of the H frame arm, and a=the arm angle. So, for our 212mm H arms, the X arms would be 300mm (212 / SIN(45) = 299.8) and the Hybrid H arms would only be 245mm (212 / SIN(60) = 244.7). Math is fun right?
So now we have a lighter, stiffer “H” that’s still optimized for front mounted cameras. #winning
Torsional Stiffness
Why do we care about this? To be honest, I really don’t know HOW stiff a frame needs to be in torsion, but I do know what happens when it isn’t stiff enough. One of my early projects was to replace the stock frame of a QAV400 with a DIY carbon fiber H frame. My new frame weighed less than a third of the original but it had very little torsional stiffness. It took me months to figure out what was going on, but it was a problem that could not be solved with PIDs alone. I had to make a stiffer frame. Watch this video and you’ll see the problem when I go into the first turn at 0:30:
Three months later, I built a test stand to measure the torsional stiffness of various frames. In the following video, you’ll see the original QAV400 frame, then my replacement frame, flown in the video above. The original QAV400 isn’t very stiff but my H frame was much worse! Next, I test a few experimental designs for future H frames. At the end of the video is a summary screen:
If you want to know more about torsional stiffness and how its calculated, there’s a great article here: https://www.fictiv.com/hwg/design/design-methods-to-improve-torsional-rigidity
Monocoque Frames
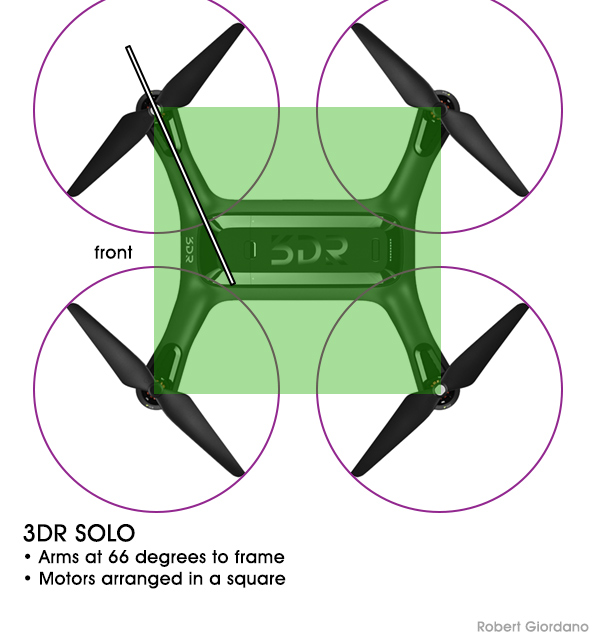
Finally, I wanted to close today’s episode with a bit about monocoque frames since @lucamax mentioned his. A monocoque frame uses the skin or outer shell as its main component. The interior is hollow so it can be filled with payload. Instead of separate arms, plates, brackets, and spacers all bolted together, the arms and body are part of a single piece (or a top and bottom half). A good example of a monocoque frame is the 3DR SOLO. The entire frame is injection molded plastic. It provides a lightweight, smooth, and aerodynamic shape with compound curves. Its hard to beat the weight and strength of a well designed monocoque frame.
But, like most DIY builders, I don’t have the money or resources to create a custom mold and then lay down carbon fiber and resin. I certainly can’t afford a production run of injection molded monocoque frames. That’s why this blog is about building a better quadcopter frame using materials that most of us can afford and access.
One disadvantage of a monocoque frame like the 3DR SOLO is that if you crash and break an arm, you’ll most likely have to replace the entire shell. One of my goals, as stated earlier, is to design a frame that’s crash resistant as well as one that’s easily repaired.