05 - Don’t Believe The Hype
I’m really excited to bring you my next post but its not quite ready yet. It will have a LOT of information and some test results that made me happy today. There will be photos and a short video.
But first, I wanted to respond to several comments about commercially available frames. I’m not here to put anyone down and many companies have spent ridiculous amounts of money to bring their products to market. Of course everyone is going to say THEIR drone or drone frame is the best thing since French Toast (and if you don’t like French Toast, I’m very, very sorry)
I don’t believe anything until I see it for myself. I don’t believe battery ratings. I don’t believe advertised flight times, and I don’t even believe published weights. (I weigh everything with two different scales). Finally, I don’t even believe my own hype. I’ll design something that looks great to me on paper but comes apart when I begin the stress tests. The new frame I’ll be showing you later tonight or tomorrow, is version 2.4.6. That means v2.1, v2.2, and v2.3 failed at least one of my tests (weight being one of them).
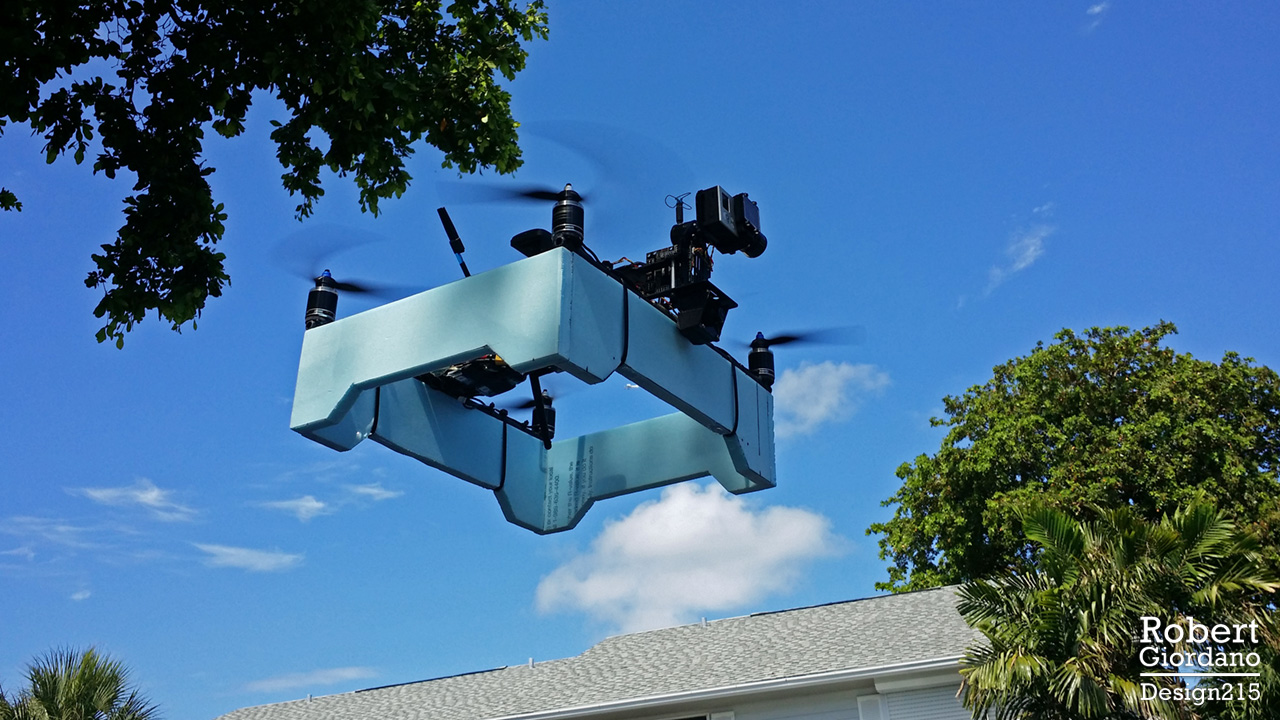
This photo proves that you can put motors and props on almost ANYTHING and Ardupilot will fly it!! This was an experiment I tried several years ago with APM 2.5 and it floats in a swimming pool! But, just because it can fly, doesn’t mean its going to fly well… or fly more than twice, lol.
I’m not a vendor. I don’t have a new drone on Kickstarter (there’s a new one every week right?) I’m here to cut through the BS and share what I’ve learned so we can all start building better frames. Yes, you can build lighter, stronger, and cheaper frames, with easy to find materials and just a few basic tools. My next post will prove all of this with an example. ![]()