Anyone interested in balancing a car? Has anyone heard of ArduRoller? This is the project web site: https://makezine.com/projects/arduroller-self-balancing-robot
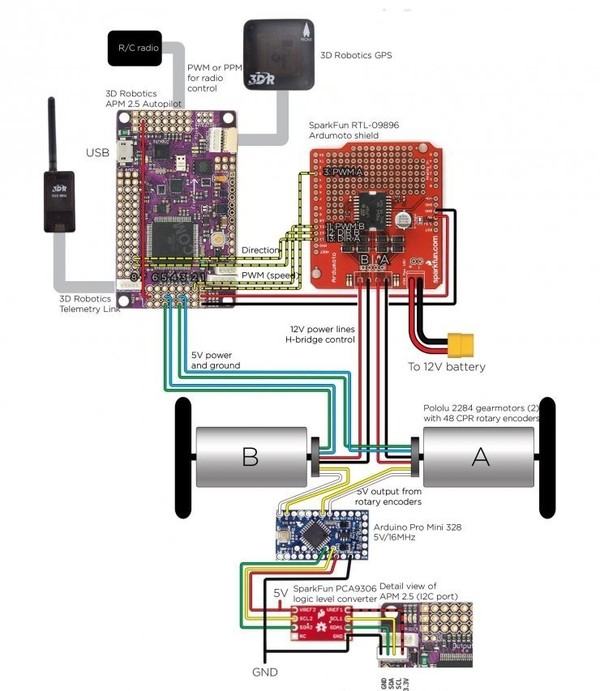
It used apm2.6 to make a balance car, which I was very interested in, and I tried and succeeded. It can balance, forward, back, turn. I don’t have GPS now, so I can’t try AUTO mode. This is the wiring diagram, and I made it based on this.
As far as I know, the author USES ardupiot code base about three years ago, and he joined the arduroller section.
Now I wonder why pixhawk doesn’t support balancing cars? After the car can balance and steer, its control is no different from tank_rover.
And the latest ardurover has already supported the AB phase encoder. It looks like we can use pixhawk instead of apm2.6 and arduino mega328.
I wonder if there is a plan for a balanced car?
Thanks!
Now this project only use APM2.x.
Now it’s one of “List of Suggested Projects for GSoC 2018”. ArduPilot will support balance bot, on more advanced controllers like pixhawk
Great - have started planning my balancing robot project. I have an original Pixracer that I can use - if not I`ll get a Pixhawk.
My inspiration for this project = ArduRoller = a great project, but hope to use supported controller…
I try to find information that can help me decide if I should use geared DC motor or Stepper motors?
I have Nema17 + a lot of different stepper drivers + have found information about how to control a Stepper motor with PWM signals using a Teency LC… (http://www.instructables.com/id/Control-a-Stepper-Motor-With-PWM/) - but need more time before I decide.
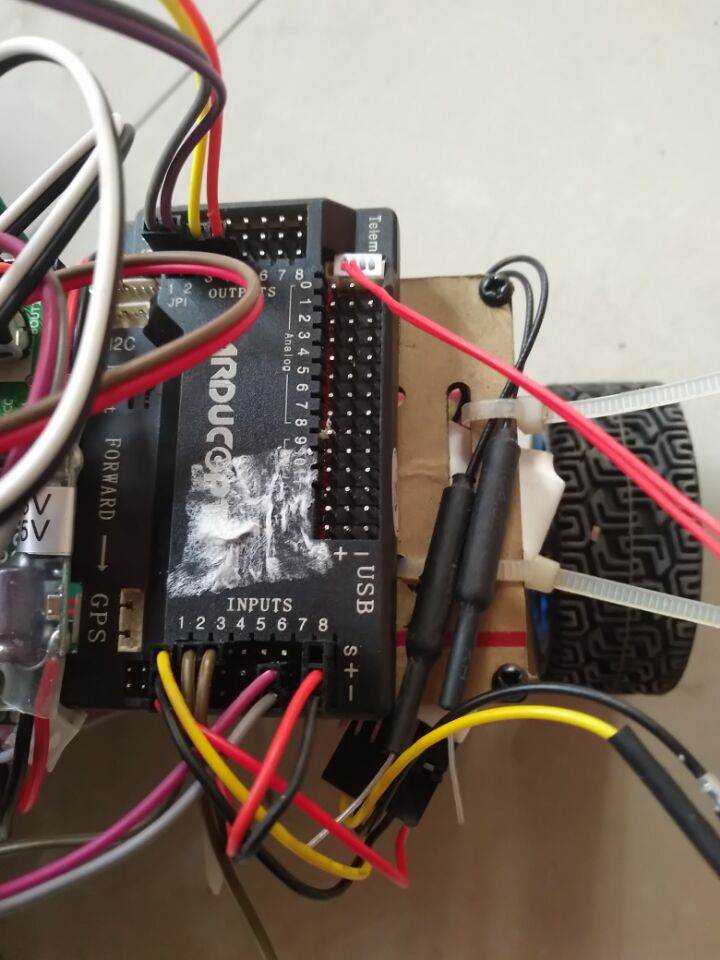
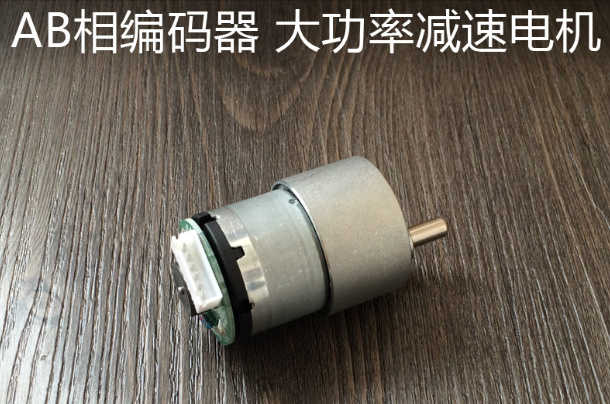
Here are what i use. Dc motor with AB encoder.
The motor drive is A4950. It’s an PWM input driver. Means that APM can driver it directly.
APM cannot driver stepper motor unless you find the right stepper motor drive.
Any information about the electronics used? Based on the original ArduRoller?
Only so I can start planning/ordering what I need.
I have a original PixRacer that I hope to use + waiting for geared DC motors and motor drivers…
My components:
That sounds good. Good to see you’ve selected motors with wheel encoders. that’s not a requirement but that will help.
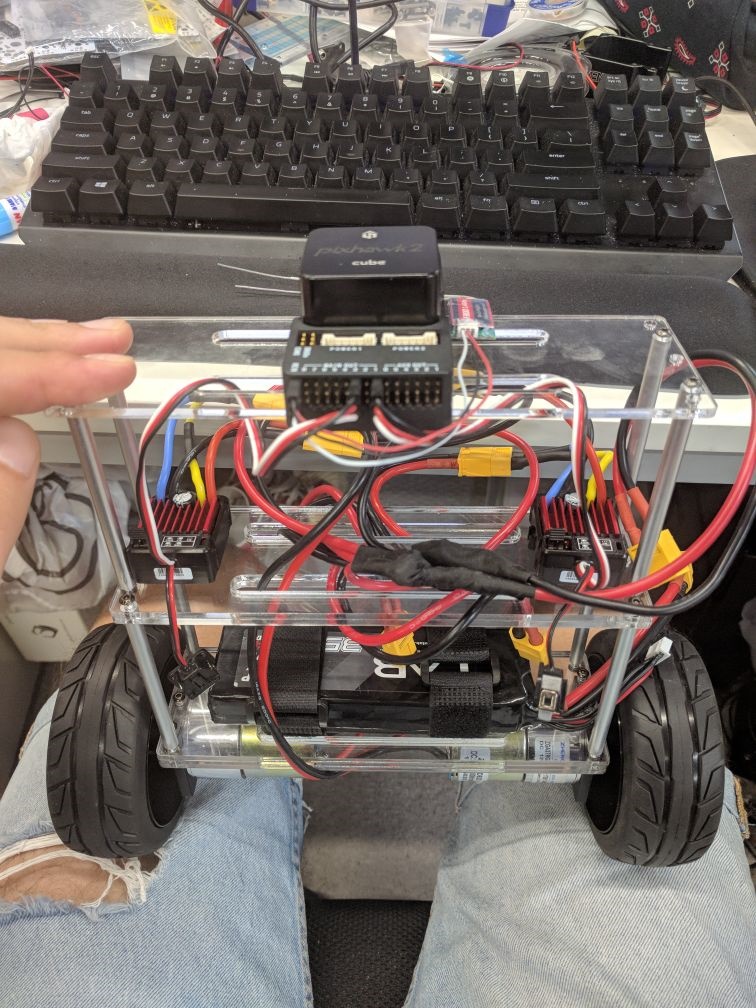
Here is what the balance bot my main support (elab.co.jp) is building for me. This one is missing the GPS in the picture (it has one now) but also the wheel encoders… wheel encoders will be added later.
Hi Mundsen,
I’m working on the Balancebot for GSoC. I’m planning to use this motor driver: goo.gl/sczkXH Looks like your list of parts is good enough, but I’m not sure if your motor driver is supported: https://github.com/ArduPilot/ardupilot/issues/7616
I am waiting for the parts to arrive right now, so there isn’t really much to write a blog but I’ll put one up as soon as we make some progress
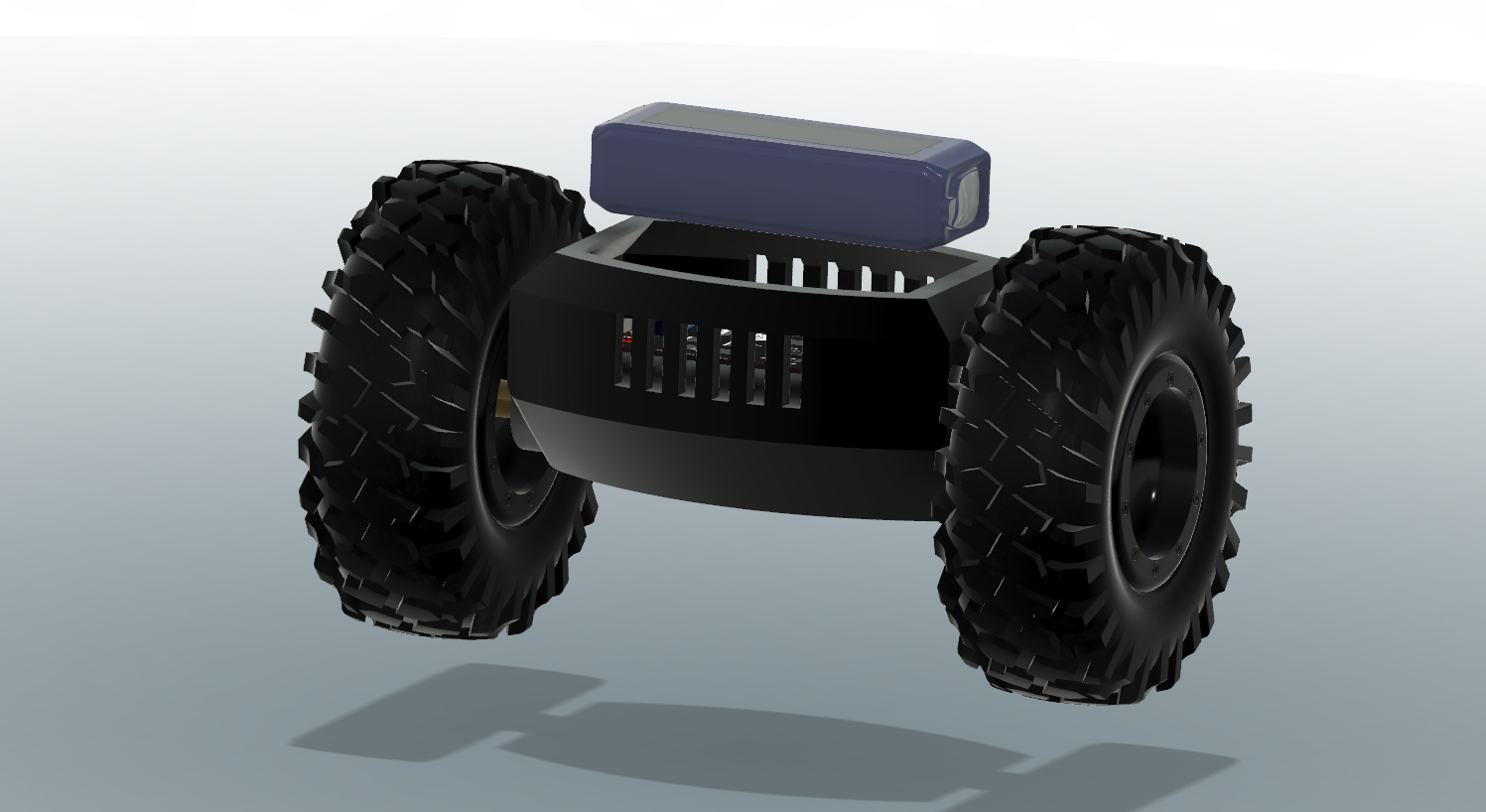
Playing with the design while waiting for the parts to arrive.
When I read about self balancing robots I find some saying there should be a weight on the top (like the batteries…) and some other say the main weight should be towards the motor axis - what is best?
In this model I have placed the motor controller on the top of the motors, and the LiPo on the top - should I swap LiPo and controller??

 )
)


 but I’ll put one up as soon as we make some progress
but I’ll put one up as soon as we make some progress