How about this project? Named ArduRoller. It use arduino mega328 to connect the APM through the i2c bus. Arduino mega328 read the wheel encoder data, then send to APM. Like this: 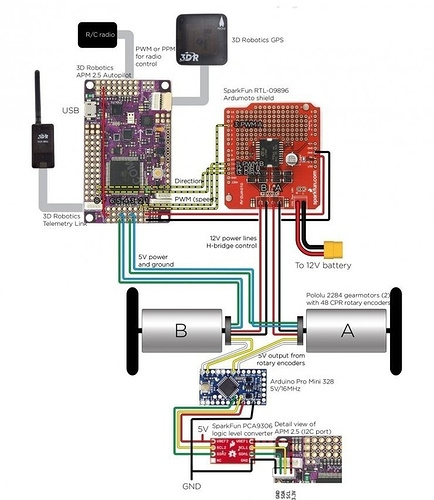
Welcome to discuss it with me: ArduRoller - balanced car on pixhawk
1 Like