I think it may need to be taller. I’m not an expert but I don’t think it matters where the controller is but I think the vehicle needs to be taller and needs some weight near the top. I think the amount of weight at the top affects the top speed - a higher weight leads to a potentially higher top speed (or acceleration?)
Imagine if the body had almost no weight - i.e. it was just the motors connected to a tubular frame, when the motors spun the frame between the motors would just spin in the opposite direction. As the weight and height of the weight are raised, I think the downward pull of gravity gives the wheels something to push against. There’s probably an ideal balance depending upon the power of the motors and how far over you want the vehicle to lean when accelerating.
I agree it may need to be taller - this is only the base.
I think there should be some distance between the motors/motor controller and the Pixhawk/Pixracer/GPS/Compass… to reduce the electromagnetic noise?
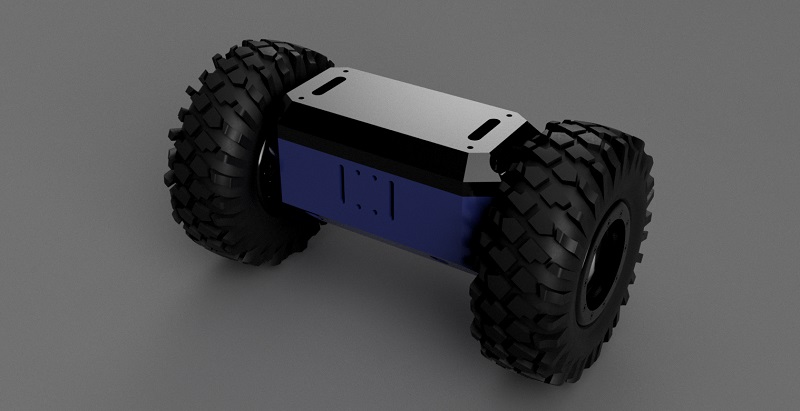
The original ArduRoller seems to have a body height something like 20-25 cm based on the image and that the wheels are 120mm
Is the “self balancing robot” support going to be limited to spesific controllers like the PixHawk/PixRacer, or also include other controllers like Raspberry + shield and the Holybro Kakute…?
Yes, It should run on any of the ardupilot compatible boards including the kakutef4. Some boards have hardware limitations, for example, I’m not sure if it’s possible to connect wheel encoders to a Kakutef4. I don’t think wheel encoders will be a hard requirement for balance bots though.
I do not have an Pixhawk (plan to use a PixRacer) - but I guess I`ll have to do some modifications to fit the electronics like Pixhawk/PixRacer, motor driver, GPS, Telemetry…
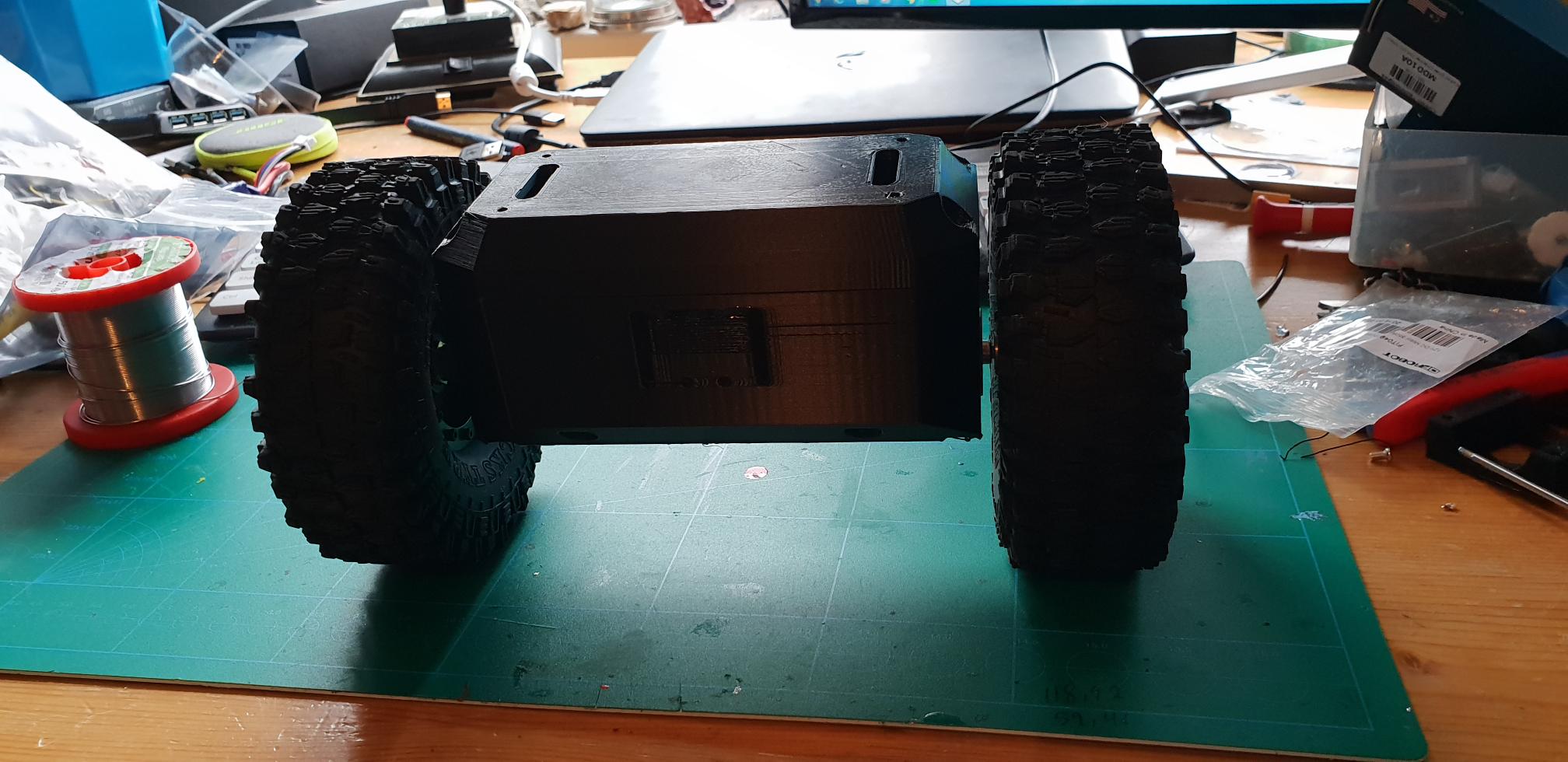
A bit tight if we install the electronics like in the original one
I think that I`ll keep the base part (only small modifications), but need more space in the other parts so it is possible to install the Pixhawk… flat with some distance between the motor controller and pixhawk… aqgree?
Looks really good. My only additional comments are let’s make sure it has wheel encoders and that it can handle falling on it’s face a few times without breaking 'cuz that’s a bit inevitable with balance bots I think.
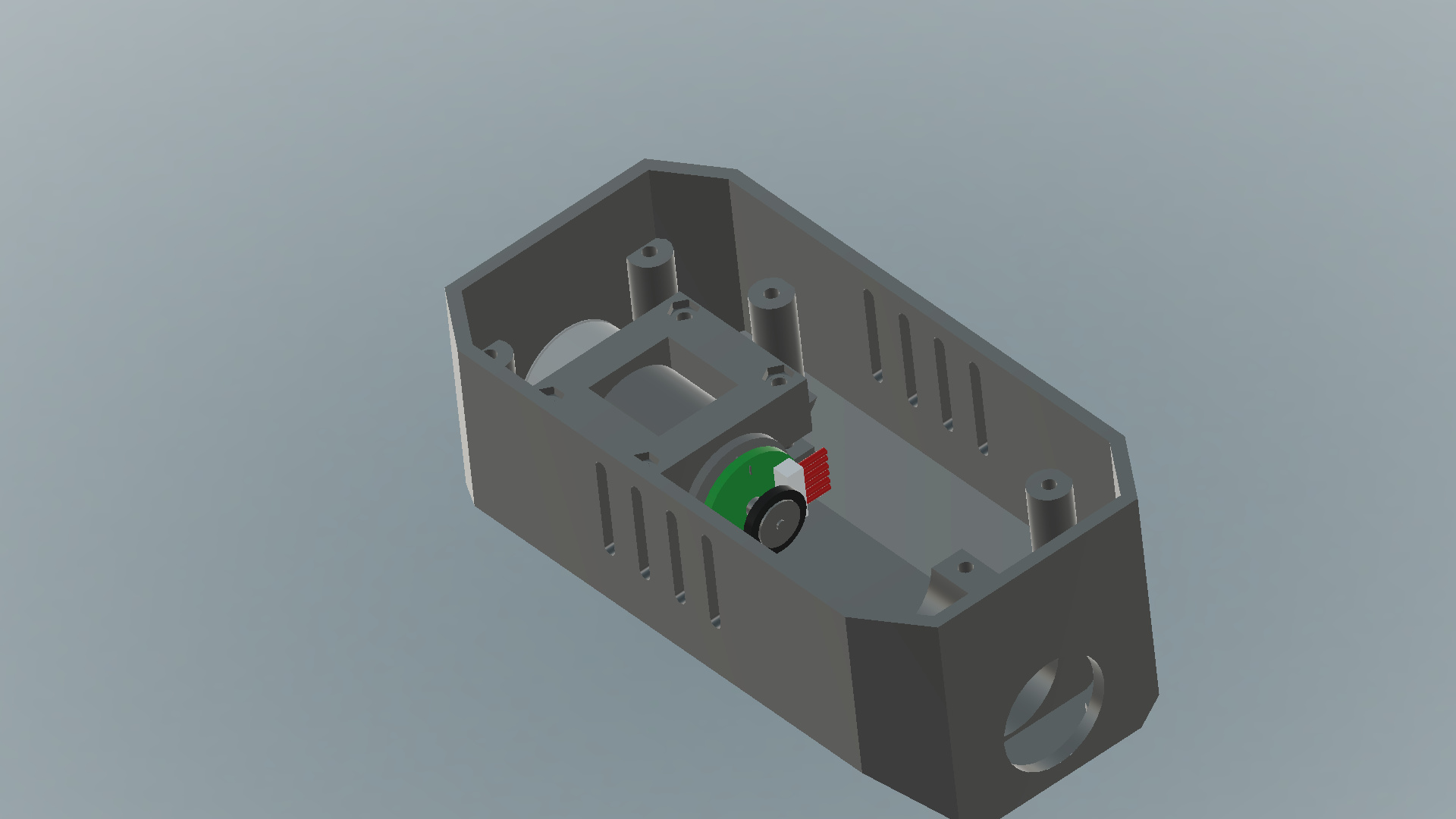
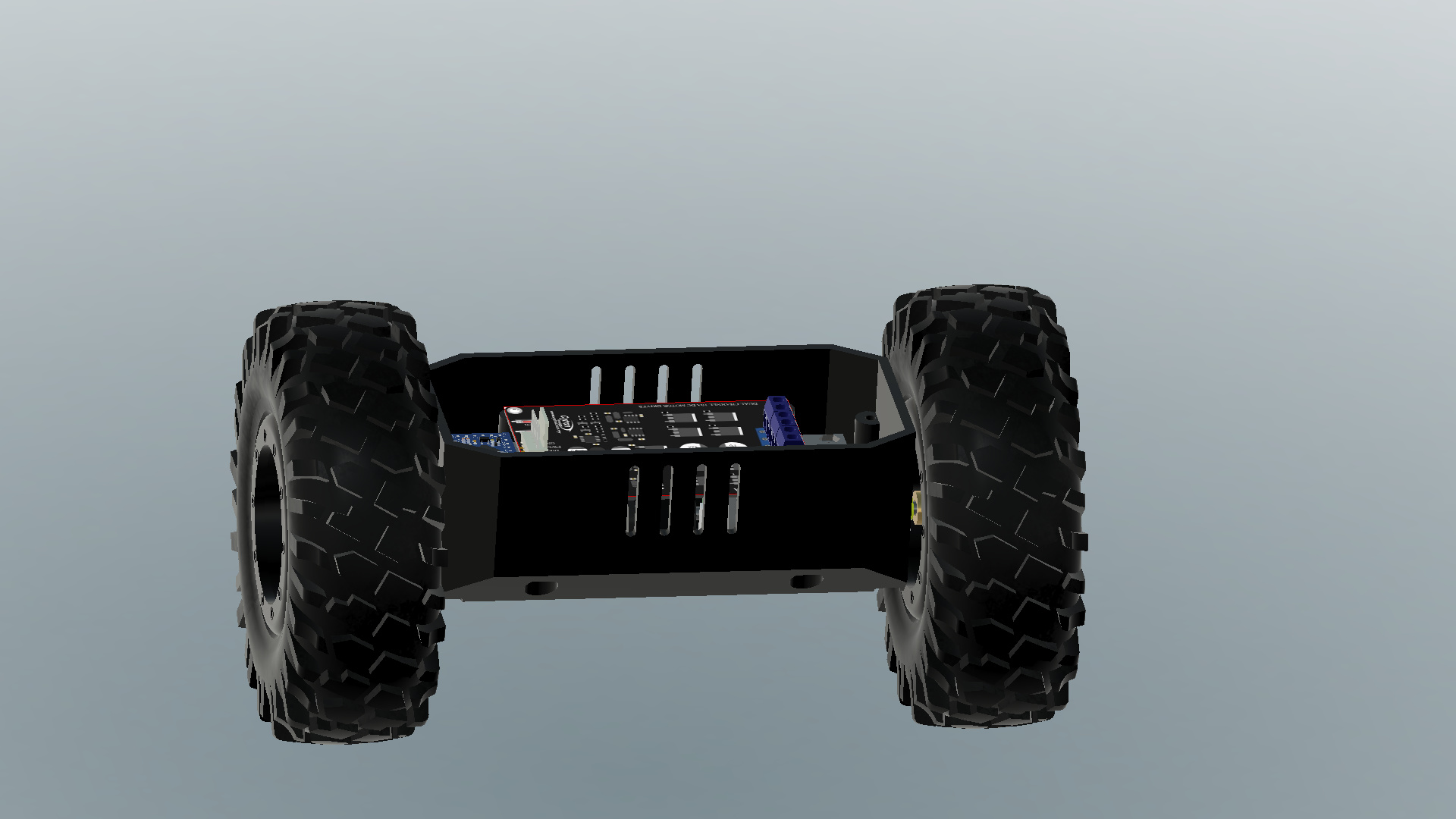
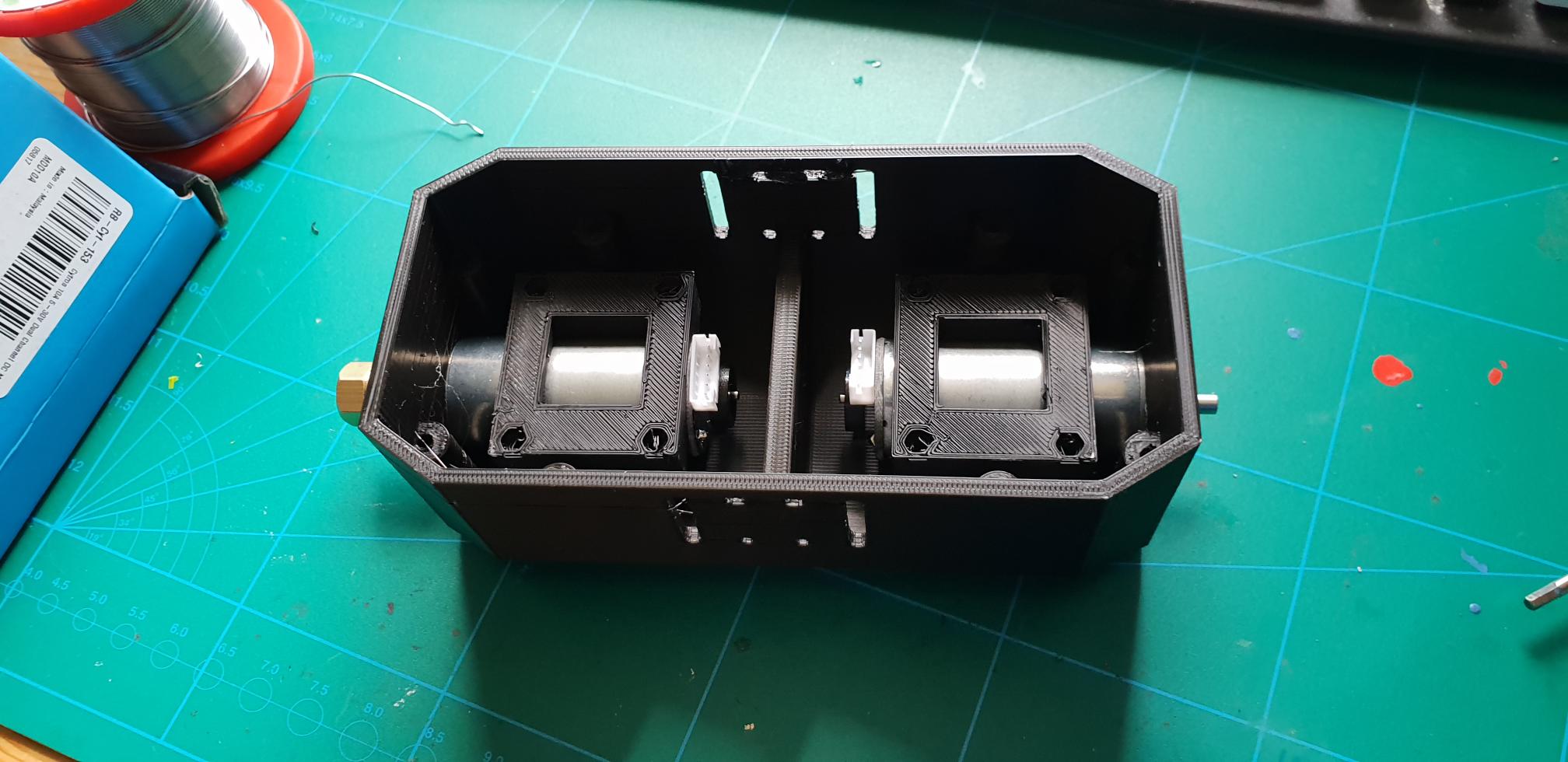
Made v1 design for my “ArduRoller” base section - motors installed using “clamps”, install the motor driver board on the top of the motors + space for a small arduino (wheel encoder).
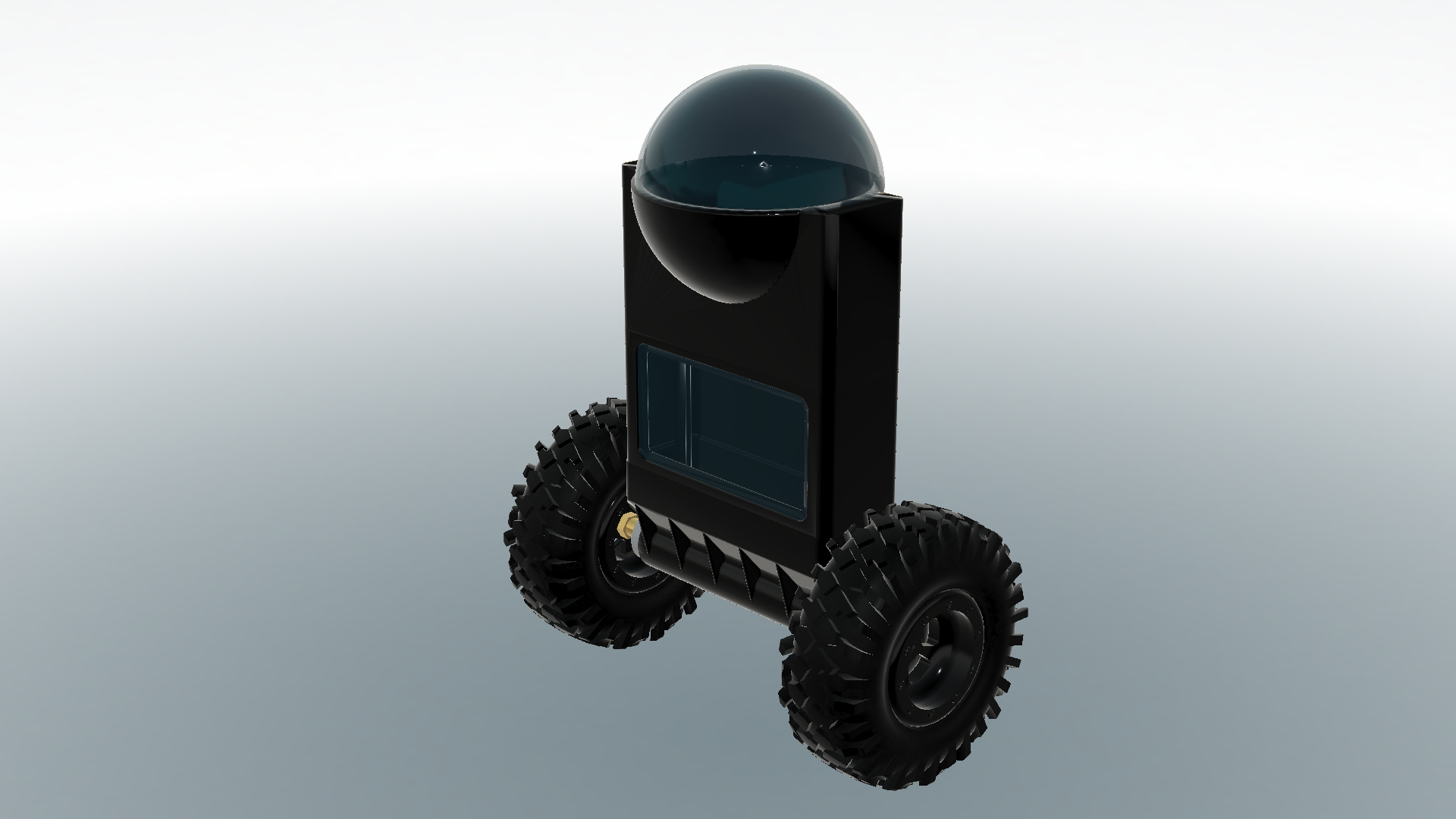
My plan is different modules on top of each other - battery module, controller module, FPV module… - in that way I can alter one module without I have to rebuild the complete robot.
Give me a hint if I spam this thread/should move this somewhere else
Base module v1 ready - playing with the rest of the model.
Top module: FPV Camera with tilt servo, FPV transmitter, telemetry/RC radio, GPS - other sensors (do not know what is the best sensor setup for a robot like this)
Hello everyone. I am just now coming back into Robotics after being gone a year or so and was wondering if this project is still active or has it fallen by the wayside? I would be very interested in building one of these and would like to follow this project.
It’s very much alive. @Ebin_Philip has made a balance bot model in sitl, and his code has progressed so it balances
I think he’s making great progress!
Cool. I’m looking forward to when these projects get to a point that the
rest of us can put it to use. I’m not as smart as 99% of the guys in
here but I try.