Hello everyone today I’m moving on 220mm fpv but when I install pixhawk and start is very bad flying (oscillations) ao I’m search for nearly pid value
(i know i need autotune but there is very very high oscillation so I can’t run autotune) and I’m found this thread
And this value put in my pix
INS_GYRO_FILTER,80
ATC_RAT_PIT_FILT,40
ATC_RAT_RLL_FILT,40
But after realize INS_GYRO_FILTER 80 is not good so I change to 230 it’s like a smooth and going to ground and realize autotune
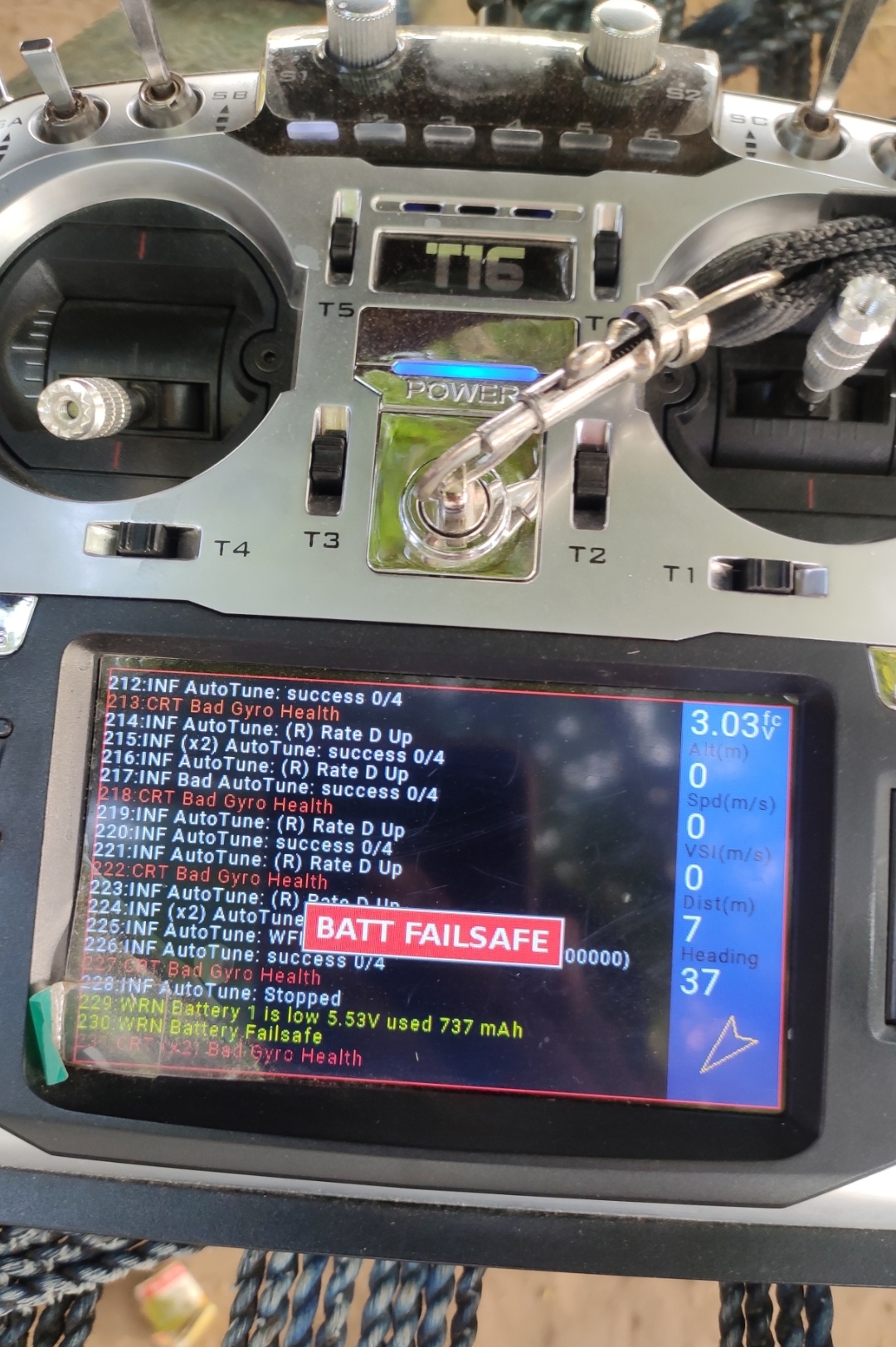
First attend :- After 2 minutes battery warning starting , I’m shocking (I’m thinking battery is not fully charge)
Second attend :- same problem nearly 2 minutes my copter dropped from 1m (and when I saw battery voltage 1st cell volt is 2.90v and … And battery tooo hot also puffy ![]() )
)

Is it possible to my pixhawk is not center ?
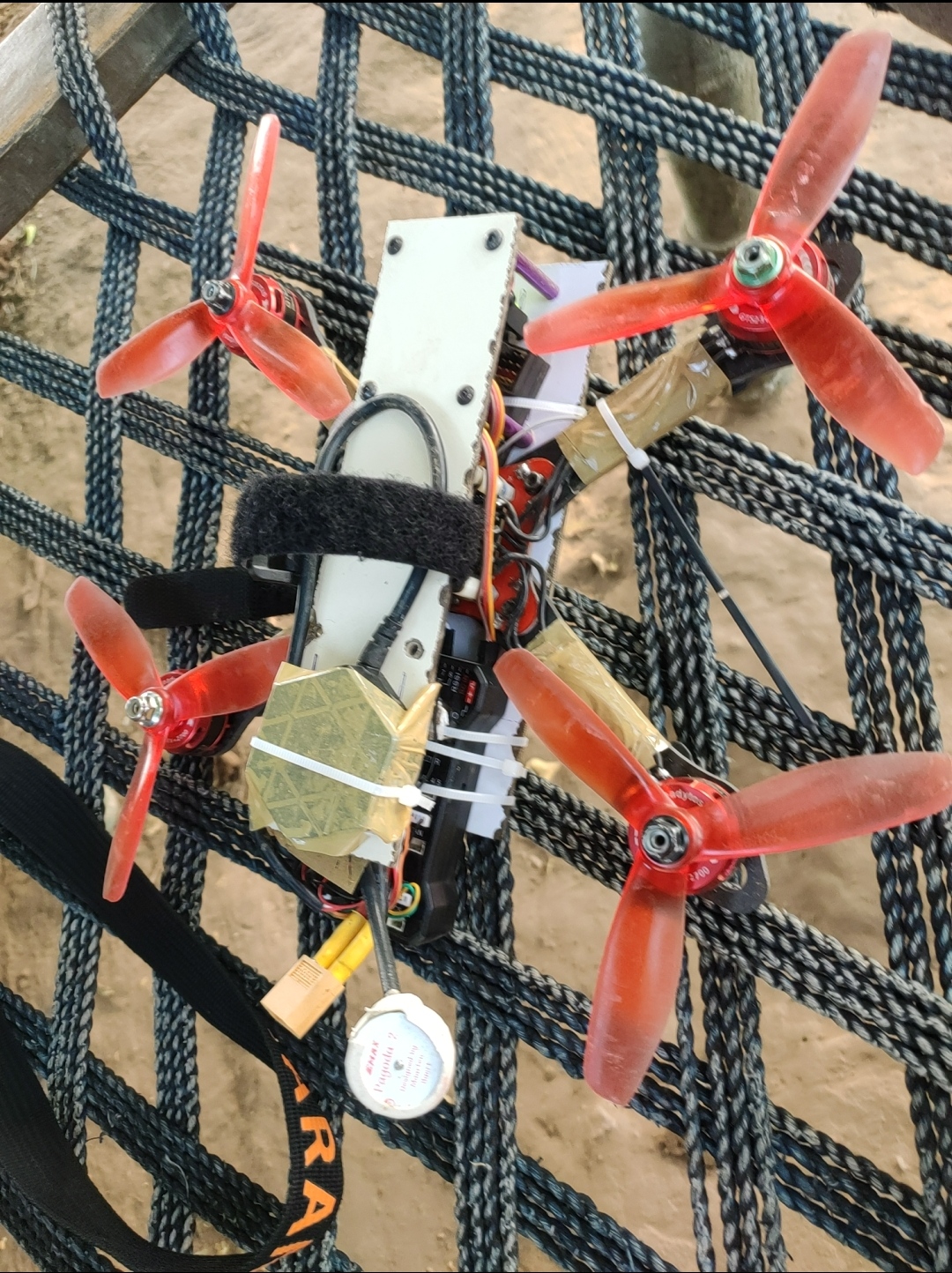
Motor :- 2700kv
ESC :- 40A 4 in 1
Battery :- 4s 1500mah 100c
And main thing motor is toooooo hot every time , why ?
Any suggestions , ………
Thank you ![]()


