I am using a 5000 mah 3s 25c Lipo battery
Hi Dave, did another flight and gave a lot of yaw commands, hopefully it contains enough data
Here’s the log
https://drive.google.com/drive/folders/17DStxyubxG-9FI72h1dgxeAf1eQo5888
Magfit errored trying to run this log. Perhaps because there wasn’t a GPS lock (no sats at all). Take it outside and fly it.
Hi Dave, As per your request, did another flight with loiter mode, here’s the log
https://drive.google.com/drive/folders/17NiEUjrDRt1y5aFkseGoTDNntgR_HazS
OK, that one worked. The GPS position was required for declination. This is the output from magfit so make these changes using the Full Parameters list.
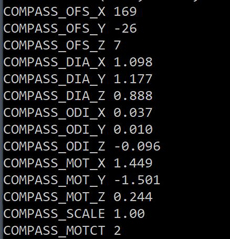
You will still have tuning work to do but this is the right way to calibrate the compass.
How do i move forward, since every thing is callibrated the right way, what is my next step
And one other thing, can i attach the gimbal and the camera
Hi Dave, just did another test flight using the new compass parameters, The yaw drift is gone, I can now observe only minute drifting, but that is to be expected given that i am using a cheap gps/compass
Thank you so much.
That’s good news. Put the gimbal and camera back on and make another short AltHold hover flight. This craft really can’t take any additional weight as the thrust/weight is already close to the desirable limit but let’s see actual.
Ok dave, I am gonna do another test flight and post the log file.
To answer your question the typical next step is to run Auto Tune. But assuming the craft can take the extra weight the gimbal cannot be active during the process it has to be locked in place. If you can’t do that then remove it before running Auto Tune.
What if i don’t want to run the auto tune, I am good with the copters performance after the yaw drift was gone, it was very smooth, I also know that if something goes wrong, i could end up with bad parameters I don’t want to jinx it.
Not much to say to that. The performance doesn’t look that good to me but it’s your choice.
Thank you dave, I will consider doing auto tune one day, for the time being I am good with the quad the way it is
1 Like
One more thing dave
These are the steps in order to be completed if one hopes to fine tune their Quadcopter
1.flash the FC with latest Arducopter firmware
2.finish Mandatory hardware setup
3.upload the initial tuning parameters
4.perform magfit calibration and update the compass parameters
5.finally perform Auto tune
Is this the correct order
Anything you want to add here
Hi dave, did another flight in althold with the gimbal and camera attached, please find the log files
https://drive.google.com/drive/folders/17h8MUp2whvgnVs4eYh2GT_DHEtIzNGPJ
You are asking for trouble with the thrust/weight condition present with the gimbal and camera installed. The average motor output is ~1700µs with a Hover Throttle of ~.54. Under Pitch/Roll/Yaw demand you will almost certainly experience output(s) maxed out with a resulting thrust loss error and loss of stability.

You could try to replace those plastic props with some better/stiffer ones perhaps even a size up but something has to be done or you risk a crash. Auto Tune probably will not run but will produce “failure to level” messages but you could try it.
And set this:
INS_ACCEL_FILTER,10
One more thing dave, I did observed some yaw drift in althold, but it was manageable
I feel like the bulk of the weight is due to the huge 5000mah battery, I could go for much lighter battery like lithium ion so that i can keep the gimbal and camera
You could but I would just use a smaller capacity LiPo. With that battery placement you have a Li-ion will play hell with the compass. They generate a lot more interference than a Lipo does.
May be a 3000 mah would be lighter option
If i want to keep the existing setup, how can i increase thrust here, what are my options