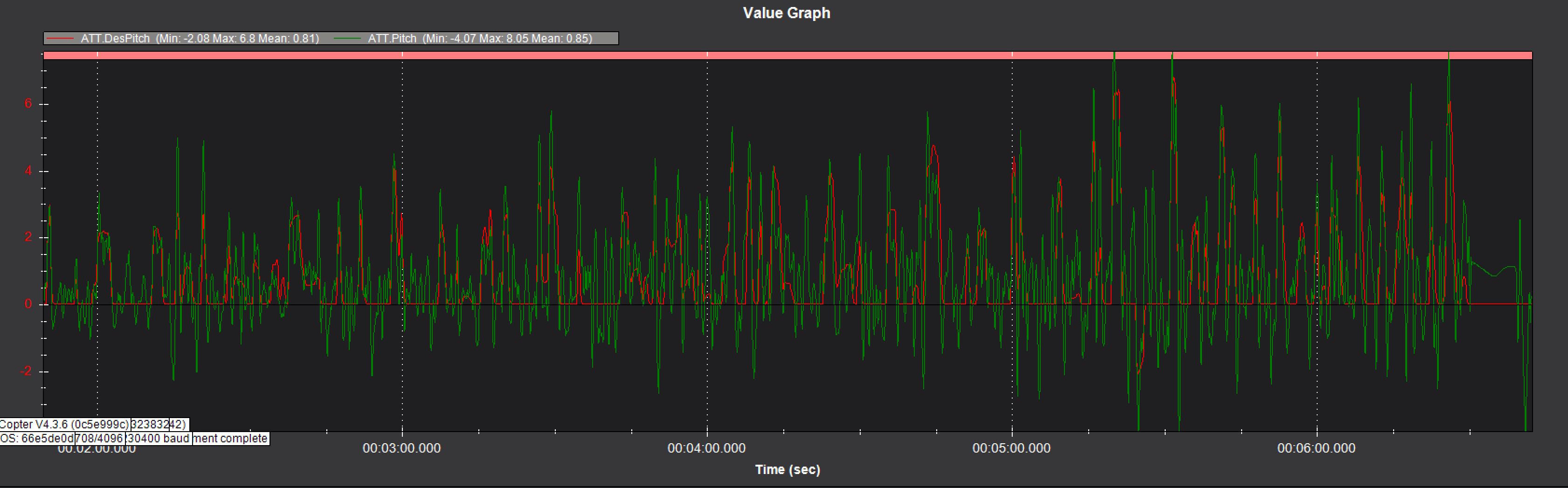
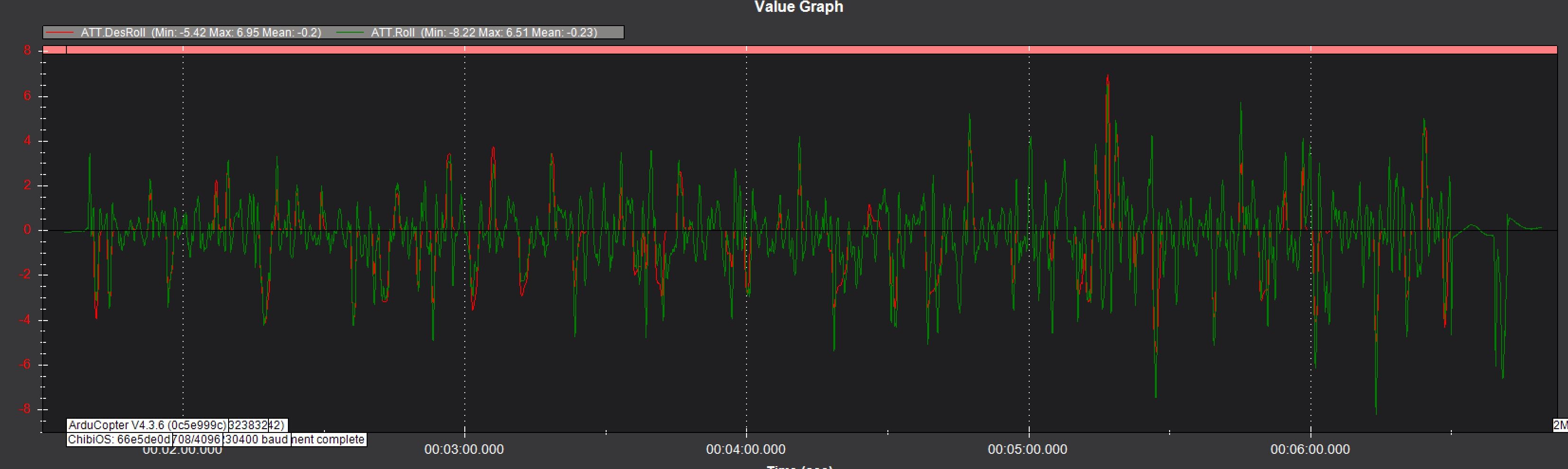
My Quadcopter is experiencing yaw drift in both CW and CCW directions without any RC input. I have checked the logs, pitch and desired pitch are exactly the same, same goes for roll but the yaw and desired yaw are way off, I mean the yaw was flat but the desired yaw is choppy
You will have to share a link to a log.
Yes Please find the log filehttps://drive.google.com/drive/folders/15qfzKPIPIShDwB_SMnquv-DTo0GKV2tG
This craft should not have left the ground, it’s on default parameters. Which Flight Controller is this because you are using the wrong firmware. fmuv2 is incorrect for any Flight Controller. So before advancing flash the right firmware so this error message goes away:
![]()
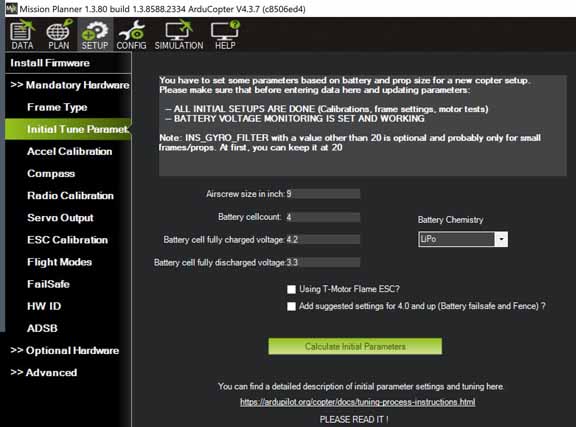
Then use Mission Planners Initial Tuning Parameters found on the Setup>Mandatory Hardware>Initial Tune Parameters.
Read thru the 1st time setup Documentation as it applies to tuning and then try the maiden flight again.
Also, you need to setup a Battery Monitor for at least battery Voltage.
I am using the Pixhawk 2.4.8 and I flashed the firmware using the Install Firmware Legacy tab on the Mission Planner, Can you tell how to install fmuv3 onto the Pixhawk, I am pretty much new at this
Go here and download the .apj file and then use Mission Planners “load custom firmware” on the Install Firmware page to flash it:
Fmuv3
It’s not a Radiolink Pixhawk is it?
Its not Radiolink Pixhawk, It is a generic Pixhawk, I don’t understand, why the fmuv2 is bad, I ran number of flights on the Pixhawk, It didn’t gave any problem except for this case
It doesn’t recognize 1/2 the flash memory so features are limited for one thing.
Sure it did, you just don’t realize it unless you review the log. The Tune is terrible as one would expect with default parameters.
I never did any tuning, I was going with the default parameters so long because i was satisfied with the performance untill now
That’s the wrong approach. There are parameter changes to be made before the 1st flight and then a systematic way to work thru the tuning process.
No one would be satisfied with this performance:
I am actually Pretty new at this, I followed some tutorials from YouTube and don’t know which performance is good and which is bad and what to expect from the drone
The Arducopter Wiki documentation is a better place to be. There are so many bad or simply old YouTube videos. Any video that doesn’t take you here before the maiden flight is wrong:
And get the battery monitor working because there are parameters that depend on Battery Voltage being available. Do you have a power module? Actually I see you may not because the Flight Controller voltage is low.
So first things first, let me flash the fmuv3 firmware and do the maiden flight and get back here, and thank you so much for your suggestions, up until now I was wandering the Internet for some quick fixes
Flash the firmware, make the initial tune changes and then set these additional parameters before the maiden flight:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Then we can take a look at whatever issues are present. On the plus side your vibration levels are low which is a good place to start.
That log shows no GPS Sats but 2 detected modules.
Thank you, I will get back here after the completion of the above said things
Actually, I was doing the flights indoor, so there is no chance that could get a gps lock, so i never invoked the loiter or poshold
And also i was using dual gps setup
OK. At some point soon you will need to go outside and make a flight in AltHold to collect some data to configure the Notch filter. It’s another step along the way to a good tune.
Understood, let me get back here with the log file after the maiden flight
Go outside, wait for a good GPS 3D Fix then do the compass calibration - that might help with the yaw issue.
You should fly outside with a GPS fix anyway - in case something goes wrong you could need the space.