Hi Dave, I did the Maiden Flight, I did two flights, today was windy in my location so i stick with stabilize in the first flight, and i did invoke the althold and loiter mode in the second flight after the winds have calmed down, just uploaded the log files to a folder named Maiden Flight in the same link i posted before. The file with larger size is the first flight and the other is the for 2nd flight.
I only see the 1st log in that link. Use the Hyperlink function here to post the link to these new logs.
OK, progress. I think you should disable the Internal compass as they rarely perform well.
Looks like you increased the Rate Pitch/Roll P&I from default. I would set them back to 0.135 for now. And then a bunch of parameters to update as follows:
ATC_THR_MIX_MAN,0.5
INS_HNTCH_ENABLE,1 (then refresh parameters)
INS_HNTCH_ATT,40
INS_HNTCH_BW,42
INS_HNTCH_FM_RAT,0.75
INS_HNTCH_FREQ,84
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.38
PSC_ACCZ_I,0.76
PSC_ACCZ_P,0.38
Read thru this Wiki Setting Motor Ranges and set these accordingly:
MOT_SPIN_ARM
MOT_SPIN_MIN
Then make another flight in AltHold (wind doesn’t matter here) for a minute or so so we can check the results of the notch filter settings. I’m sure they will be OK but need to check anyway.
After that make another flight in whatever mode you want but do several figure 8’s and some throttle changes. This log will be used to calibrate the compass using Magfit.
There are some points i want to discuss
- I already disabled the Internal Compass, I am only using one compass that is the external
2.I haven’t made any changes to the PID’s manually, I am guessing They got updated due to Intial setup Parameters that i gave - I removed the gimbal and camera as they add too much weight as i read from the tuning page that the copter should be as light as possible.
4.I also removed the dual gps setup and using only the neo 7m for the maiden flight because i didn’t trust the m8n as it caused some issues for me in the past
OK, I see that now.
Initial Parameters don’t update those but whatever, set them back to default anyway.
Got a photo of this craft? Let’s see where the GPS/compass module is.
The Neo-7M is old tech. I would replace it with an M8N or an M10.

And also i have observed some weird behaviour when i tried the loiter mode, it was staying in one place for some time, after that it started climbing very quickly, so i put it in land mode, I am guessing RTL was invoked due to some gps glitch
I realize you have removed one GPS module but FYI you can’t use 2 different modules for dual use.
What’s all that Velco for on top?
Just a comment about the components on that craft. Those motors are poor quality and you never want to use collet prop adapters, if that;s what I’m seeing, on a multirotor. Replace those cheap plastic props with some better ones. Are those ESC’s the generic shrink wrapped units that come with many kits? Those should be replaced with some BLHeli_32 ESC’s.
That velcro is for securing the battery on top of the frame, and as for the parts those are all i can afford for the time being and what do you mean i can’t use different gps for dual, I am using that setup for quiet a while and i haven’t encountered any problems
I mean what the Arducopter Wiki says about GPS blending. It’s pointless really to blend a 7M and a M8N module. Just use 1 M8N or M10 module.
I think the m8n that i have is sketchy, because it has caused a crash from loiter mode one time, atleast thats what i think, I opened up the module and tested each and every component for short they all are fine, anyway I like to keep the dual gps setup as it is even though it is pointless because it never let me down in the past, can i know why the copter rised so quickly from loiter mode, is it an hardware issue due to the old 7m.
Please also note that I am limited by the Hardware I can buy in my country and money.
Need a log to review.
It is in the 2nd log with less size
i know why the drone suddenly rose from loiter mode, It was a battery failsafe because i have set the failsafe voltage as 10.8 and the failsafe mode was RTL
Hi Dave, I have completed the 2nd flight in both althold and loiter mode, both tests went great
Attaching the log file
https://drive.google.com/drive/folders/16tspyk5EXszujl0wH7b3EUW6vztum6eR
Not sure what to make of this log. All you needed to do was set the Rate Pitch/Roll P&I values back to default. You set other parameters back to default so you are going backwards. Run the Initial Tune Parameters again and set them back. This does not change the Rate Pitch/Roll P&I values, you can clearly see that in the table presented after running it.
And it makes no sense to blend 2 GPS units with individual performance like this:
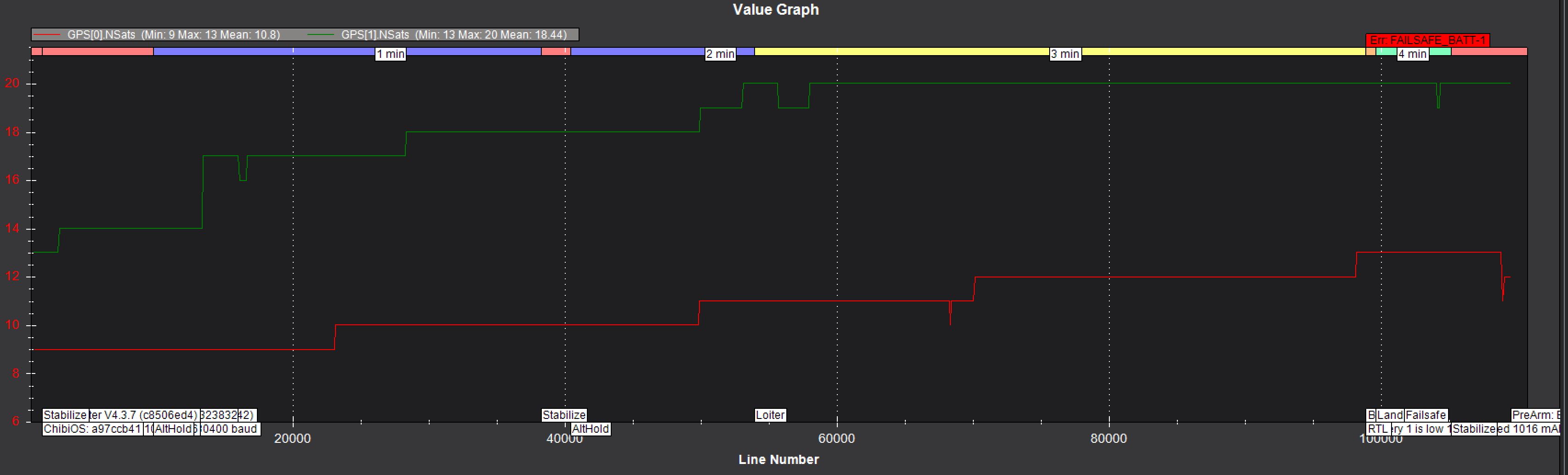
The only good thing to say abut this configuration is the Notch filter is working well.
And there is not enough Yaw in this log to be useful for Magfit. As suggested you need to do a couple figure 8’s and some throttle changes.
BTW-You mentioned you removed some hardware. That’s good because this craft cannot take additional weight. The thrust/weight is OK now but on the low side. The average motor output and the MOT_THST_HOVER value tell us this.
Sorry dave, got little confused, I will run the initial parameters again.
What do you suggest about the dual gps setup
I will do some figure 8’s and increase the throttle a bit to get some data in the logs
I wanted to put back the camera and gimbal what do you suggest about that
It is getting difficult to control the craft between the winds and the yaw drift in order to make a figure 8.
Figure 8 means giving the yaw and the roll at the same time right?
Not to bother with it. Use 1 M8N or M10.
Use loiter. And it doesn’t have to be figure 8’s just a lot of yaw changes.
BTW-What battery are you using?