Since I didn’t have a problem other than a little wobble when taking off in althold and loiter modes, I flew in a plan that I uploaded to mp in auto mode. It was a successful flight, but I think my pid values are still not very good. It wobbles a lot during sudden turns and stops. I would appreciate it if you could help me by looking at my log files and video.
https://drive.google.com/drive/folders/1-N5SaRR1jCoNG6s-Jdf7Efi911KwyDxf
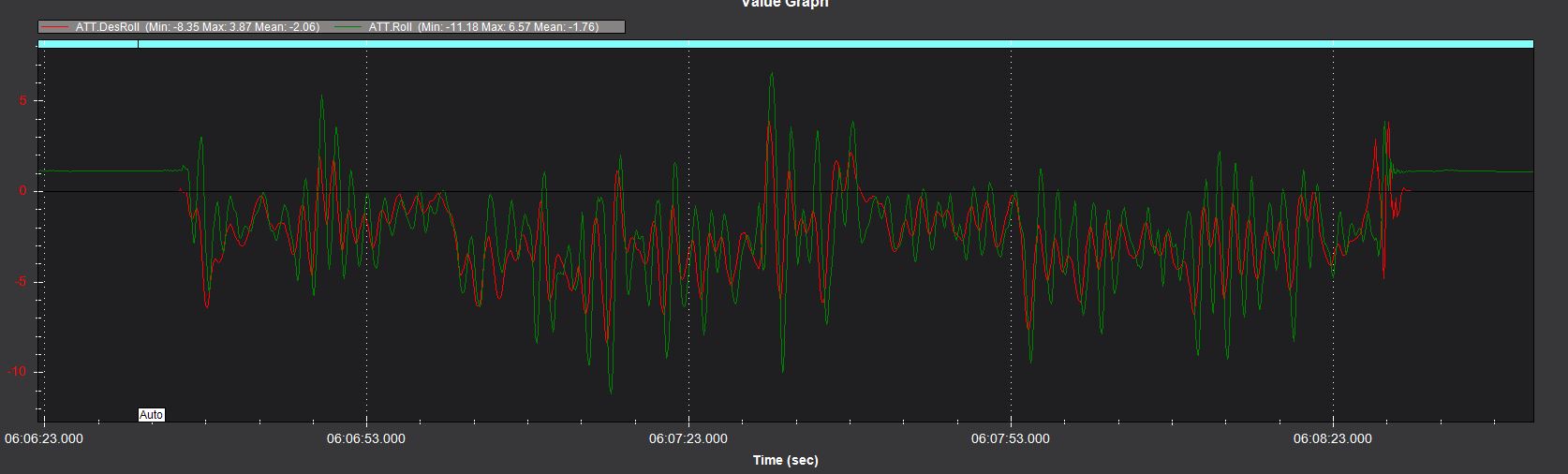
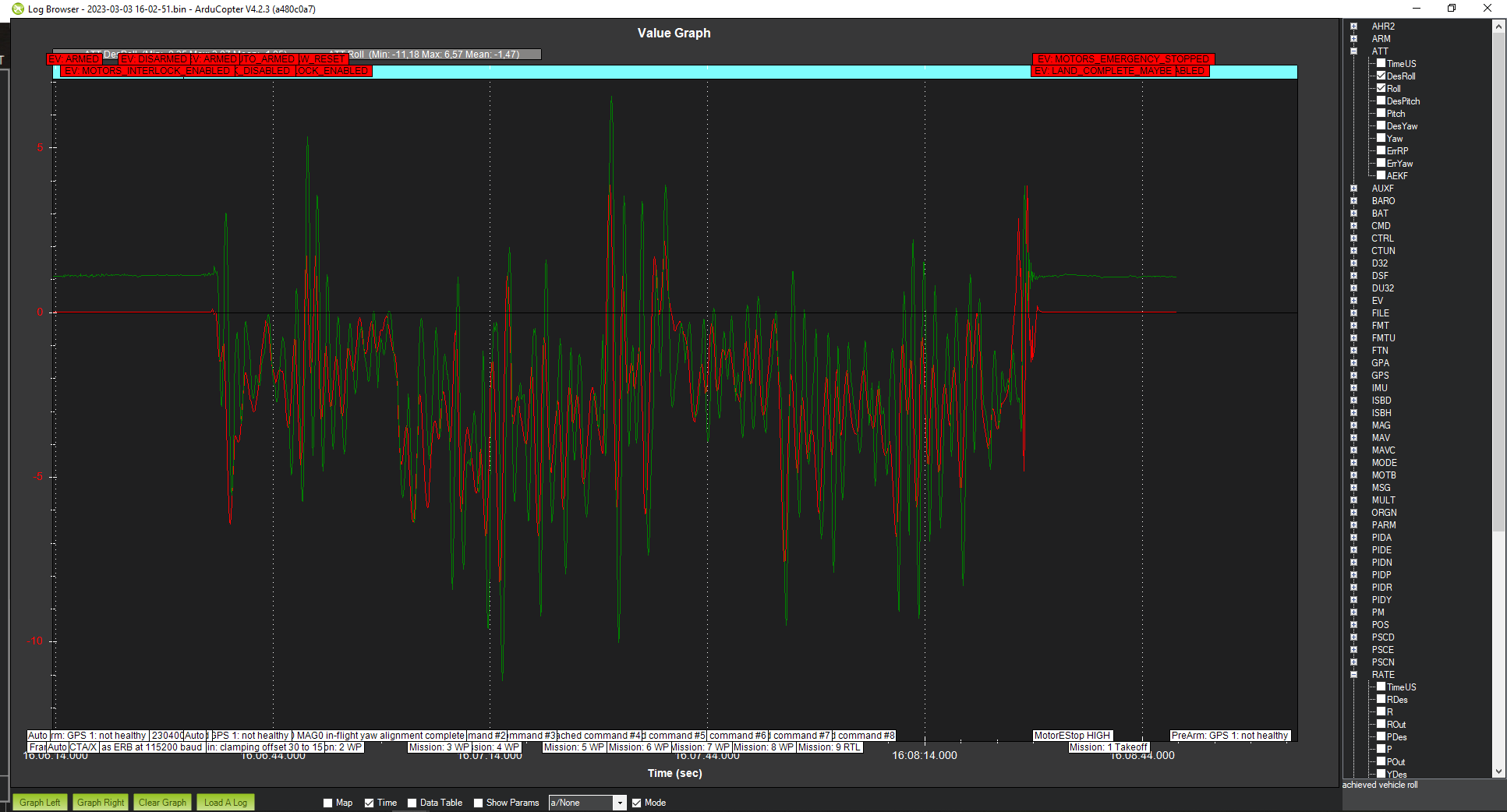
I flew in autonomous mode again in slightly windier weather and encountered terrible wobbles on that flight. The des declination and the declination value don’t exactly match. I don’t think that’s the only problem. I don’t know if it’s the pid or something else.Thanks for the help.
I added the video and log file of the new flight to the drive.
https://drive.google.com/drive/folders/10GoB2TEyeIMW10L_Px-4Bj76lrRSxGsA
I sent the log files I sent incorrectly, I’m sorry for that, I updated it now
Tuning is poor. How did you arrive at those PID’s? Describe the components of this craft.
And set this to 1 INS_LOG_BAT_MASK. You only have 1 IMU.
Thanks for your answer
“Navio2 contains two 9DOF (degree of freedom) IMU: MPU9250 and LSM9DS1.”
Can you give more details when you say your tunings are poor? I remember using Initial parameters while making my settings. Are there any changes you can say for my tunings ?
Navio 2 raspberry 4 b
12s 100kv t motor p80
octo x frame
3016 propellers
Only one IMU is being recognized:
INS_ACC_ID,1442050 (MPU9250)
INS_ACC2_ID,0
INS_ACC3_ID,0
Pitch and Roll Tuning is bad:

I don’t see much evidence of PID tuning just a reduction in the Rate P&I values. Update to current Stable firmware and review the Dynamic Notch configuration then run Auto Tune.
Set these as per the Wiki also:
PSC_ACCZ_I
PSC_ACCZ_P
What pıd tuning settings would you recommend I change manually before autotune?
You should read this article before initial tuning.
https://ardupilot.org/copter/docs/setting-up-for-tuning.html#setting-up-for-tuning
I already started by taking these parameters as a reference. Are there any parameters you suggest I change?
I didn’t manage to do this for navio 2 i don’t know how
@Resny73 you tried to autotune the drone? or working with the very Default PIDs???
I’m a little hesitant to try autotune because my drone is too big. I’m flying with the default parameters right now, but it does some wobble. I flew even in auto mode, but there is still some wobble
@RES1 use given links for refrence
https://ardupilot.org/copter/docs/autotune.html
and Automatic Tuning with AUTOTUNE — Plane documentation
we autotuned this drone. is your drone bigger than this?

first of all thanks for your answer. My drone is slightly bigger than that but my main reservation is that I don’t trust my pid settings. and not relying on the risk of failing and dropping the auto-tuning that I come across a lot while researching on the forums.
These are the videos of the old version but I’m uploading it for you to see the size.
https://drive.google.com/file/d/1sfqXpCRaRv1M65ORcEGud1Y8PdclvJXA/view?usp=share_link
You seem to be struggling with some very basic tasks. While I don’t want to discourage you too much, I strongly recommend building, tuning, and flying a smaller quadcopter (10” or less props) before attempting to fly this large craft any more. I’d hate to see you hurt yourself or someone else through a lack of knowledge or experience.
1 Like
Man you would have hard time autuning that as this is not a small drone and you don’t have a rig like

as there is no other way of autotuning PIDs just like that without flying the Drone.
hope you find PID values which matches your drone.
I understand and respect your concern. However, I already fly a drone of the size you mentioned with nice pids. However, as the drone grows, things get harder and this big drone could not show the same performance. (You can be sure that I took the necessary safety precautions)
1 Like