Hello everybody,
I change the PID values one by one, but there is not any change on flight. I want to know why this happens.
Can anyone help me about this?
Hello everybody,
I change the PID values one by one, but there is not any change on flight. I want to know why this happens.
Can anyone help me about this?
Changing them one by one will not get you what you want/need.
You need to change them methodically and systematically with a certain order.
https://ardupilot.org/copter/docs/ac_rollpitchtuning.html#ac-rollpitchtuning
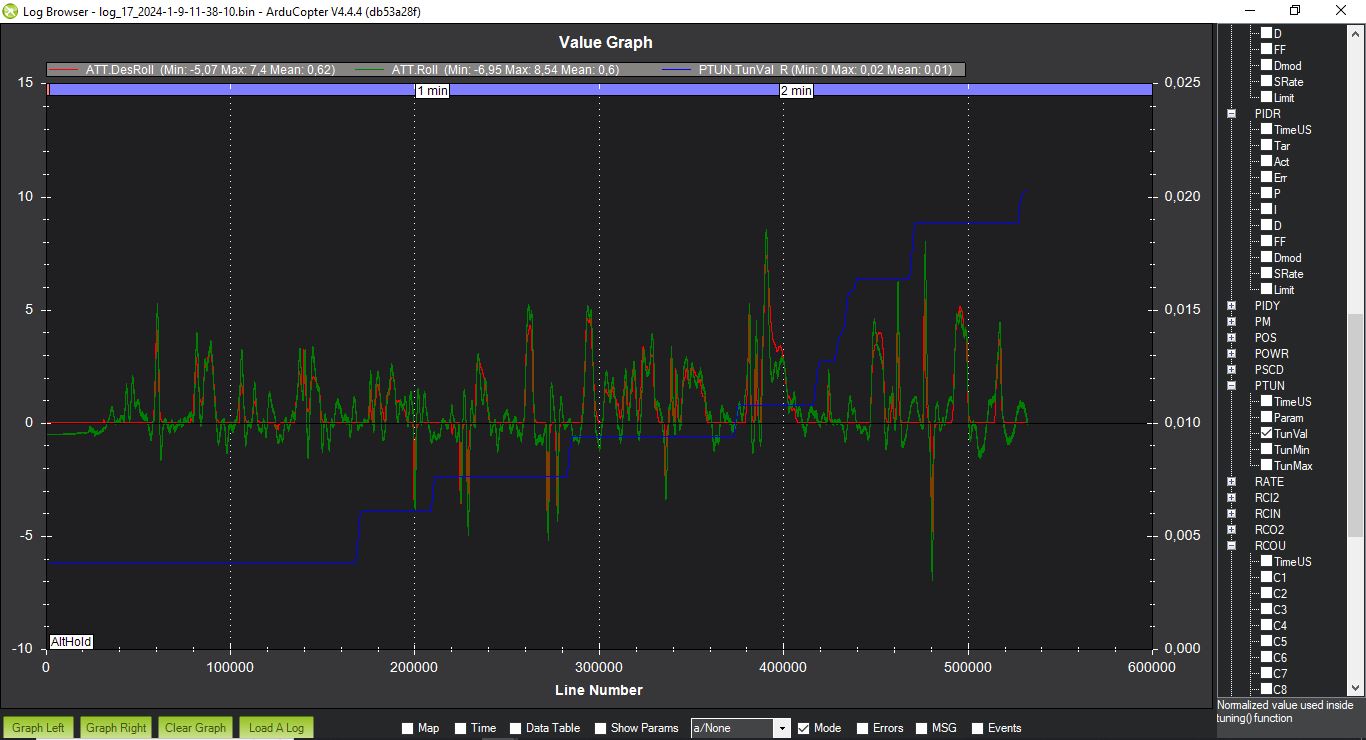
I followed these steps, but how much I increase D term, ossilation is not observed.
You can see it below:
Increase it more. Add follow How to methodically tune (almost) any multicopter using ArduCopter 4.4.x
Thank you for your sharing. I’ve built many copters before. This is the first time I encounter such a situation. My copter’s vibration values are very good. Altitude attitude is very good. I do not encounter any problems while the vehicle is in the air. Just changing the pid tuning does not make any difference in the copter. WHY?
I think this friend had the same problem as me but couldn’t find an answer.
Exactly which parameter are you changing?
ATC_RAT_RLL_D
ATC_RAT_RLL_P
ATC_RAT_RLL_I
I actually changed these parameters during the flight via channel 6. (I kept the min. - max. range wide). No observable oscillation occurred during flight