Here’s something cool…
That was one cool crash…lol
Are you letting FC to control the stability?
I have personally never built a 3 motor VTOL therefore I have limited knowledge. I am currently designing a 5 Motor solution (4 for quad frame and one for push).
We flew in FBWA. As soon as we transitioned into FBWA the plane lost control. At first we thought the CG might be too far aft due to the camera and caused instability but we added weight to the front and got the same behavior. I wonder if the added weight made it stall or if we just have the PIDs completely off… What are your PID settings?
If you need help with the quad settings etc I’m sure we can help you somehow!
Your CG is good? Did you check…
GregCovey is expert in this field @GregCovey
maybe he can help you guys…
We put a screwdriver, cube of aluminium and a metal spanner in the nose to bring it forward even more but we still had a similar behavior.
If you could share your mixing_gain value and PID we can compare with what we have  I will upload a .bin as soon as the cube has done its time in the rice.
I will upload a .bin as soon as the cube has done its time in the rice.
EDIT: I’d like to double down on the fact that yes, we checked that the CG is correct but who knows maybe I miss-judged it 
Ah yes, Greg has helped us a lot. Thank you both for showing interest in helping us and others
2 Likes
This is how you calculate CG for a flying wing. It is not the same as standard fixed wing.
" Flying Wings & Delta : Do not have a tail (second wing ). … The CG value is always measured from the leading edge (LE) in the center of the main wing . For longitudinal stability the CG is placed 5% to 15% of MAC in front of the NP. This margin for stability is called Static Margin"
Here is a calculator;
I have not flown mine yet. I am doing major customizations so it won’t be ready for another month.
You want Flying wing to be nose heavy, ALWAYS. not 100% leveled. Its due to drag and uplift.
Here is another baby almost ready to fly. Waiting for two batteries from China to arrive. 62" Wing Span. Its called Reaper XL 62".

1 Like
And to make it Nose heavy, don’t use a screwdriver. Go to your local fishing store and get lead fishing weights. they are small and very heavy. You can easily insert them inside the plane body and tape them at the nose part of the plane (inside the fuselage)
First figure out the additional weight you need.

You can also change the position of the battery as it carries a lot of weight. Another solution.
Show me how your battery is positioned inside and what size it is.
1 Like
Hello everyone!
I am also working on a VTOL project, but I’ve had some problems with the precision landing using a IR-LOCK beacon and a pixy camera. The issue comes when the drone is close to the beacon and begins to move erraticaly, even going away from the beacon. I’d like to know how to improve the movements in x/y( The values of px/py are high, you can see more details in the logs files).
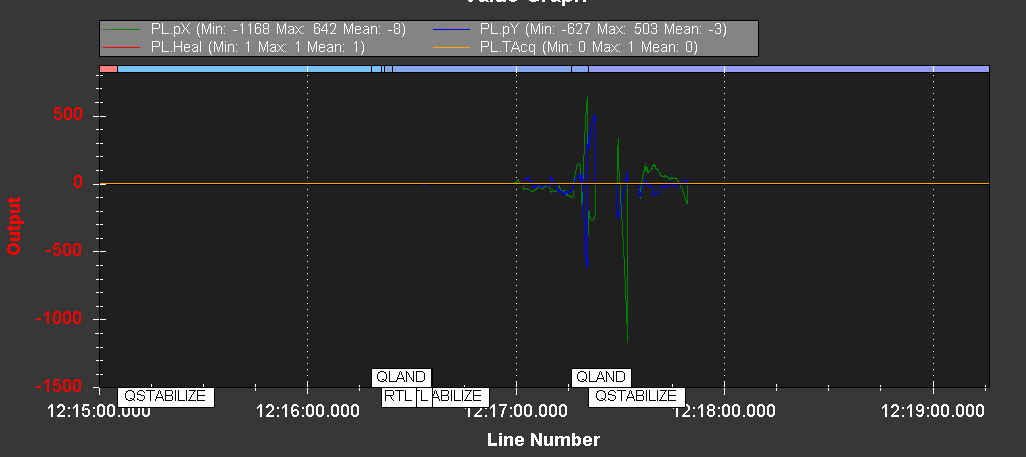
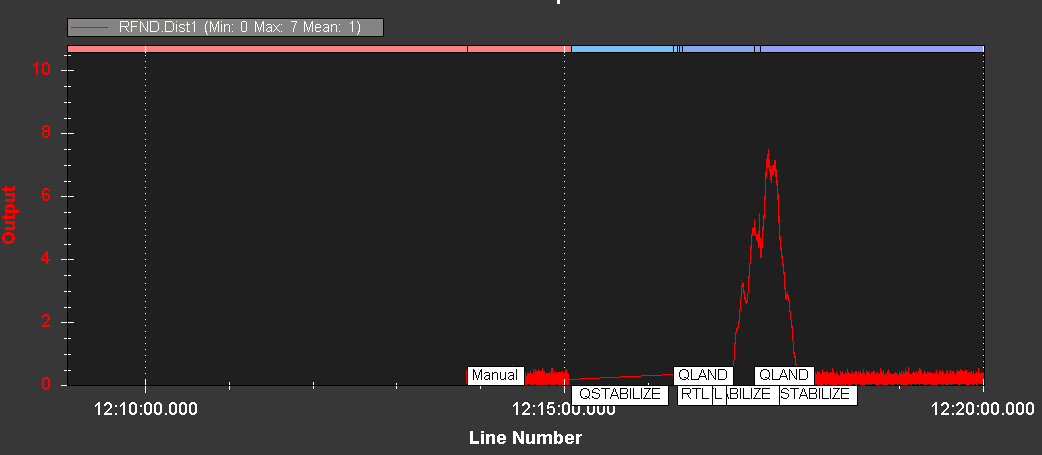
Thank you for reading!
Juan_Flores Check this thread
Thank you Asim for being so helpful. We will make sure the CG is correct for the next iteration as sadly the plane got destroyed at the end of the evening. We have two more x8 bodies on the way but due to the virus it has already taken two months hehe…
I’ll upload a video of all our tests and the events leading up to them soon if you’re interested.
Thank you for your help, again!
From what I see in your crash video, it is not about the cg, but there is something wrong in your transition settings. You can clearly see it ended the transition, setting the front motors into plane flight position much too soon and it just stalled not having enough airspeed to sustain plane flight.
If you were a little higher it might have recovered. Do you have an airspeed sensor on this plane?
1 Like
We do not have an airspeed sensor installed currently. We didn’t have time to test its behavior in water so we skipped it. We plan on integrating it somehow in future iterations.
Hmm yes I believe it might be a mixture of PID, CG and stalling going on here. I am still drying the flight computer and will look into the logs soon.
Will report back
They had a CG issue before and they used a screw driver to balance it :), hence my comment.
They for sure have some other issues
Sorry for not updating, we’re inte middle of the finals period  Here’s a little highlight reel we put together for anyone interested. I’ll post a longer version with commentary in the future.
Here’s a little highlight reel we put together for anyone interested. I’ll post a longer version with commentary in the future.
2 Likes
Speed sensor will help. Buy a digital one not analog version which plugs into I2C port.
Make sure do all the speed sensor calibrations.
Keep me posted
p.s. are you all studying hard to get A’s?
Hmm Interesting… We will look into that ASAP!
About the A’s, you bet!