have you connected each board to verify they both work on their own?
yes every one works.
how are you powering the arduino? it should be 5v ground from the flight controller going to the VCC pin not RAW in

change the 5v input on the arduino from VIN pin to 5V pin.
1 Like
Thank you very much for your help, everything works great ![]()
1 Like
I noticed that when idle, the wheels spin a little on their own. FOC SPD_MODE was selected in the board firmware. What can cause independent movement of wheels?
its a tiny deadzone, you need to adjust the servo out trim value so its exactly in the centre.
1 Like

I changed DEADBAND in the firmware, unfortunately the wheels still scroll forward or backward when idle. I don’t understand if this is interference or if I’m not working in the right direction
change the deadband to 100
#define PRI_INPUT1 3, -1000, 0, 1000, 100 // TYPE, MIN, MID, MAX, DEADBAND. See INPUT FORMAT section
#define PRI_INPUT2 3, -1000, 0, 1000, 100 // TYPE, MIN, MID, MAX, DEADBAND. See INPUT FORMAT section
1 Like
Hello, I set DEADBAND, but nothing changed, it started spinning in one direction without stopping when idle. I think we need to somehow remove the interference.
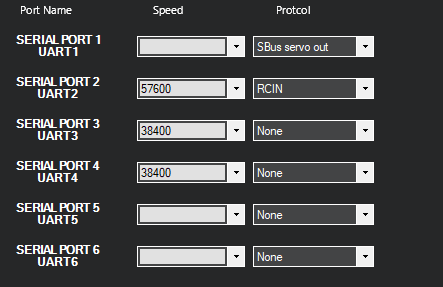
have you set the servo out trim on ardupilot. are the outputs at 1500? are you using servo out 1 and 2 ?

do you have control of the motors other than they are slowly moving when idle?
Yes of course, even very good motor control.
are both sides moving?
yes movement forward and backward, also turns
sorry I was meaning are both motors moving slowly when the should be idle?
at first they stand then they turn very slowly after a pause they turn
in the same direction or opposite? did you set the steering coefficient to 0?
1 Like