have you tried increasing the servo output trim on ardupilot to see if it stops or does it just change direction?
yes I tried it, it just changes direction
its very strange, it’s like the controller is not using the dead zone, this is the binary I use.
eferu_hoverboardibusv6.zip (20.6 KB)
I tried it, it’s standing still and can’t be controlled, can I look at the Ardurover settings?
It also seems that the dead zone is not used
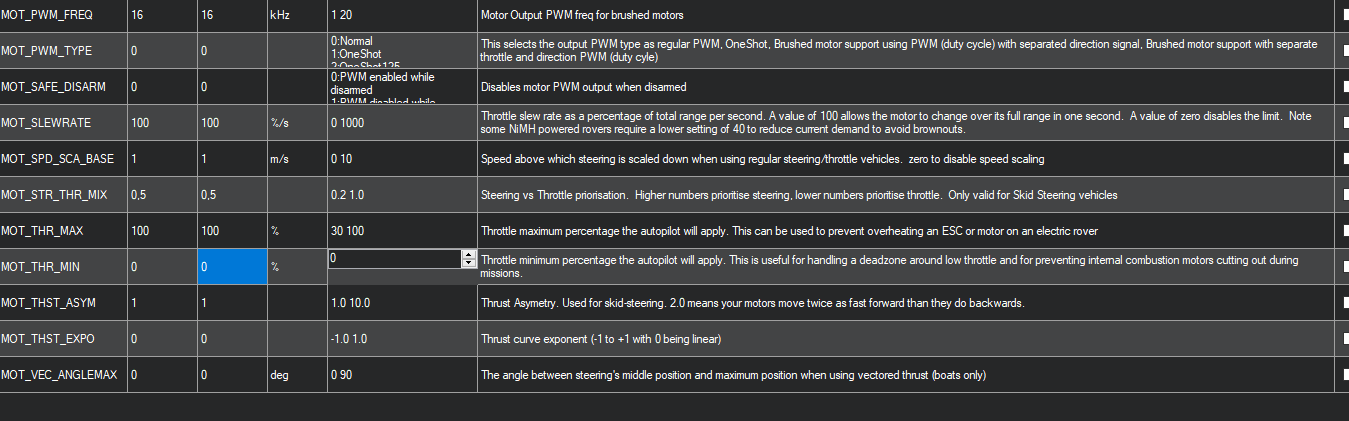
have you got MOT_THR_MIN set to zero?
It’s cool to look at your firmware file config.h ?
I have made a mavlink hoverboard manager,
using a RP-2040 you can get a lot of serial ports so i have gave each controller its own port and one for mavlink, its currently set up for up to 3 boards but could run up to 5.
It reads servo output 1 and 2 via mavlink and sends that to each hoverboard controller using UART hoverserial protocol.
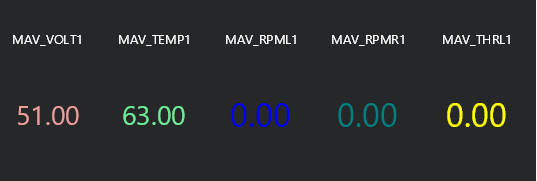
it should then read the telemetry values from each hoverboard and send it to the controller via mavlink as named floats.
Its currently a work in progress, im going to add some power management to it.
2 Likes
Finally got a tyre adapter to take cheap wheelbarrow tyres printed and fitted. the tyres that fit it are used on road rated mobility scooters so are almost £35 a corner, wheel barrow tyres are only £9 so its worth printing an adapter.
I’m mainly wanting them for my urban rover to reduce vibrations for the cameras.

my first version of a mavlink hoverboard controller is working! still needs some work but its basically functional. it reads the RC in from mavlink servo output value then converts it to a target RPM, it also reads the telemetry from each controller and sends it to the flight controller as named floats.
it’s setup so its only sends an RC packet to the hoverboard when it receives a mavlink packet so any failures will just cause the motor controller to time out and stop.
next step is to make the controller paramters configurable with mission planner and get the power management working, so the controllers switch off to save power when idle.
1 Like