Yes it works great for that, im using the esp8266 bridge at the moment for telemetry but it would be nice to not have a 2.4ghz radio on next to it interfering with it especially on rovers where your not traveling far and dont need low latency controls.
I use this project on my transmitter to make OoenTX support mavlink:
http://www.olliw.eu/2020/olliwtelem/
I use it with wifi and a RPi zero connected to a UART of my Radiomaster TX16S. But it should work with any module/device (ESP, telemetry modules, etc.) accepting mavlink over UART.
1 Like
Thats looks great, the firmware is doing the rc to mavlink conversion inside the radio. Im still on a taranis so i dont think it will run that firmware unfortunately, might be a good reason to upgrade my radio.
I used this firmware, after a couple of weeks I got tired and I returned everything back. It’s like a toy. In a phone or computer, it’s much better. When autopilot, then there are more possibilities from a laptop, when on radio control, then you will look at the model and not at the display of the .
This is my personal experience and my opinion. As a result, the Radiomaster is gathering dust, now I will use a compact Jamper Pro with b/w display ![]()
1 Like
yes im not terribly interested in the rest of it, its just the RC > mavlink RC that interests me, if it was done in the module then it would be much more compatible with different radios.
Here is an idea, can we take one of the hall sensor wires from each motor and connect it as pwm in so we can use the hall sensors as wheel encoders?
Ardurover expects a quadrature signal (90° offset) as the wheelencoder signal. It is a on/off signal, not PWM. You could read the hall encoders with an arduino (or better something faster) and calculate a quadrature signal from the hall encoder signal. I tried to do something like this, but my mathematical mojo was not up to it.
My hoverboard rover just has no wheelencoders and the other one has AS5047 magnetic encoders on the motor shafts.
Perhaps there is something to find in the depths of the internet.
1 Like
This looks like it could be useful
https://www.digikey.co.uk/en/blog/using-bldc-hall-sensors-as-position-encoders-part-1
1 Like
done some tests with the sr04 on the front of the rover, it was picking up a lot of ground reflections so it didnt make very good progress, next tests with a lidar should work better.
1 Like
Made a video of my rover going over uneven terrain to show the chassis articulation keeping all 4 wheels on the ground when a fully rigid chassis would stuggle.

The motors can generate 12 nm of torque at 16A so converting that to kg and for the size of the wheel means each 160mm motor can generate 8kg of force, so as long as it doesn’t break traction My rover should generate almost 50kg of force with all 6 motors.

2 Likes
I have a hoverboard that is 10 inches, designed for a rider up to 100kg (from the instructions). I think that in our trucks the problem is more with ground engagement than with torque.
1 Like
Yes I have found issues running 6 wheels where the centre wheels are slipping a lot so im having to add some spacers to bring the centre board down 5mm so that its taking more of the vehicle weight, it should also help with turning by letting the outer wheels skid easier.
Your correct that it will loose grip before it runs out of torque unless its its on dry pavement.
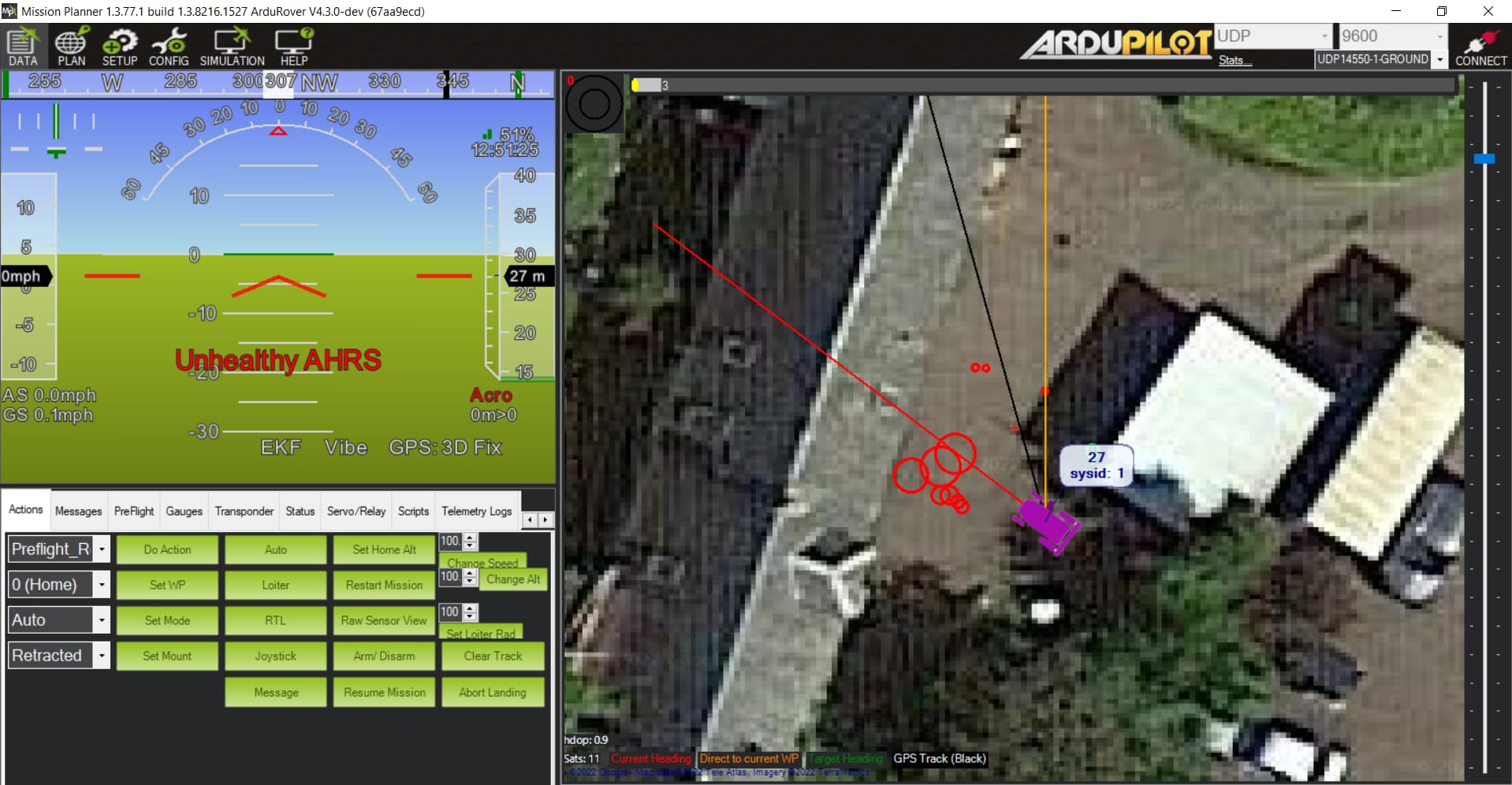
I have been driving around the garden testing Andruav.-AP
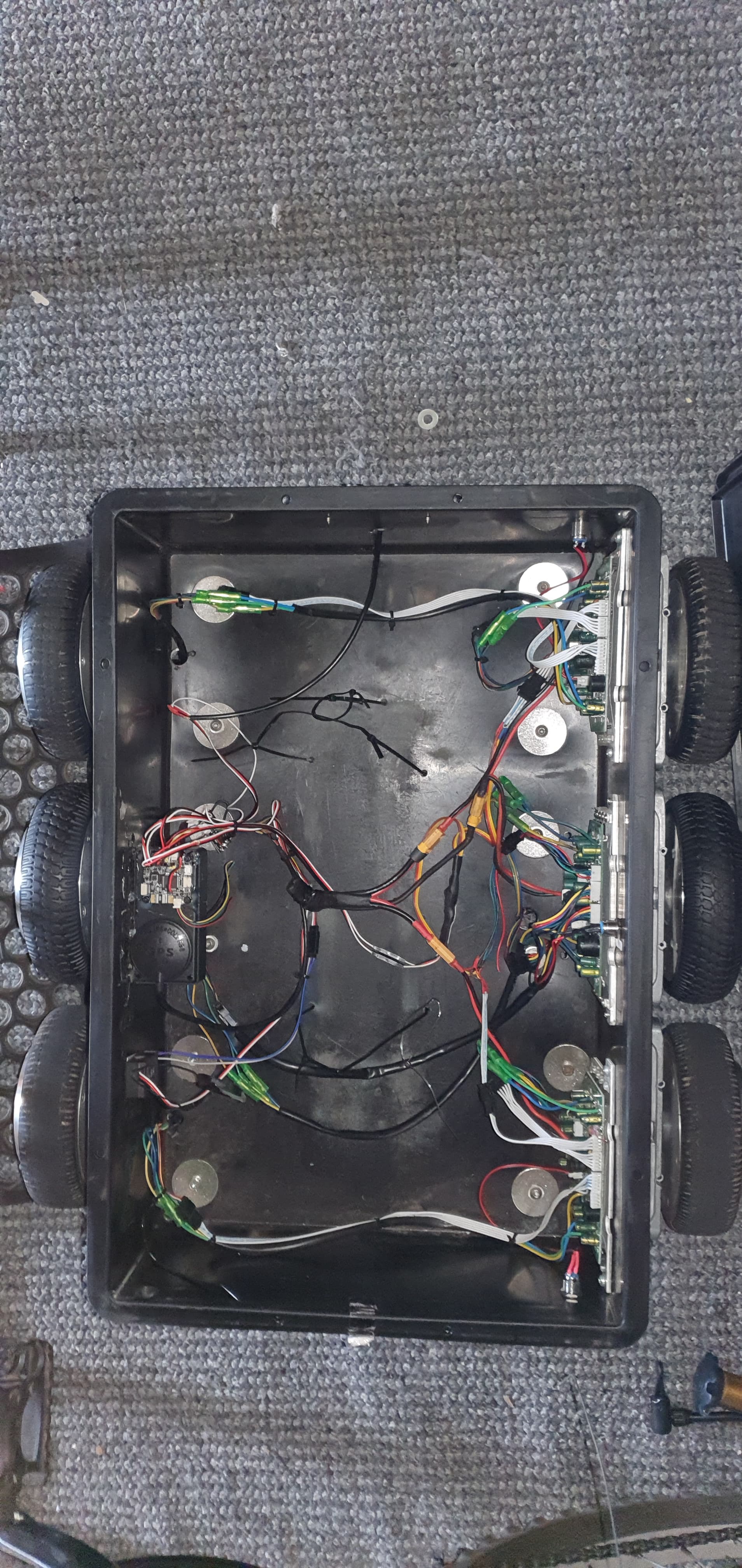
I have had another 2 motor controllers fail, turns out the voltage regulators on them are extremely marginal with just enough capacity to run the sensor boards and thats it. so any kind of overload on any of the rails and the whole thing pretty much self destructs.
so, totally forgetting that im running the electronics from the hoverboard because im waiting for a 48v>12v stepdown converter, I was trying to get my phone into dock mode so it wouldnt drain the battery. So when when i plugged my phone directly into the flight controller with it in dock mode it tried to charge at full current at something like 2A , this was enough to destroy the power systems in the boards. after some digging around, this is a extremely common failure mode on boards that come with Bluetooth modules as they tend to fail short and blow the rest of the board.
So, DO NOT POWER ANYTHING FROM THE HOVERBOARD REGULATORS
2 Likes
Hi, I am interested in this.
I already built a cart with a hoverboard which I drive around to carry stuff.
I drive it with the RC directly using the PPM-Sum signal from the receiver.
Now I would like to use Ardurover to control this thing.
As I understand it, the only option to control the motor with Ardurover is to use the PWM variant and put 100nF capacitors on the input of the board ?
Is there already any work or consensus toward adding a protocol either in the hoverboard firmware or ardupilot to control these motors digitally ?
What effort would make more sense ?
Adding Mavlink (or something else) to the hoverboard fw, or adding the hoverserial protocol to ardupilot ?
Thanks
1 Like
I think adding serial support directly to ardupilot would be the best way to do it as that would get both digital RC control and telemetry for voltage, speed and temperature. The only issue i see is when running multiple controlers it will need multiple serial ports but modern f7 controllers have up to 7 and can nodes are avaliable so its not so much of an issue.
The easiest way would probably be an arduino adapter converting SBUS to IBUS and converting the telemetry to values that can be shown in ardupilot using the unsupported sensor adapter code and lua.
Currently the only way that works is PWM mode with the capacitors.
I found this video on youtube thats cool, I have tested with a joystick but not with a steering wheel yet.

1 Like
I found that there is a ESP-NOW MAVLINK RC system out there, someone has already made it!
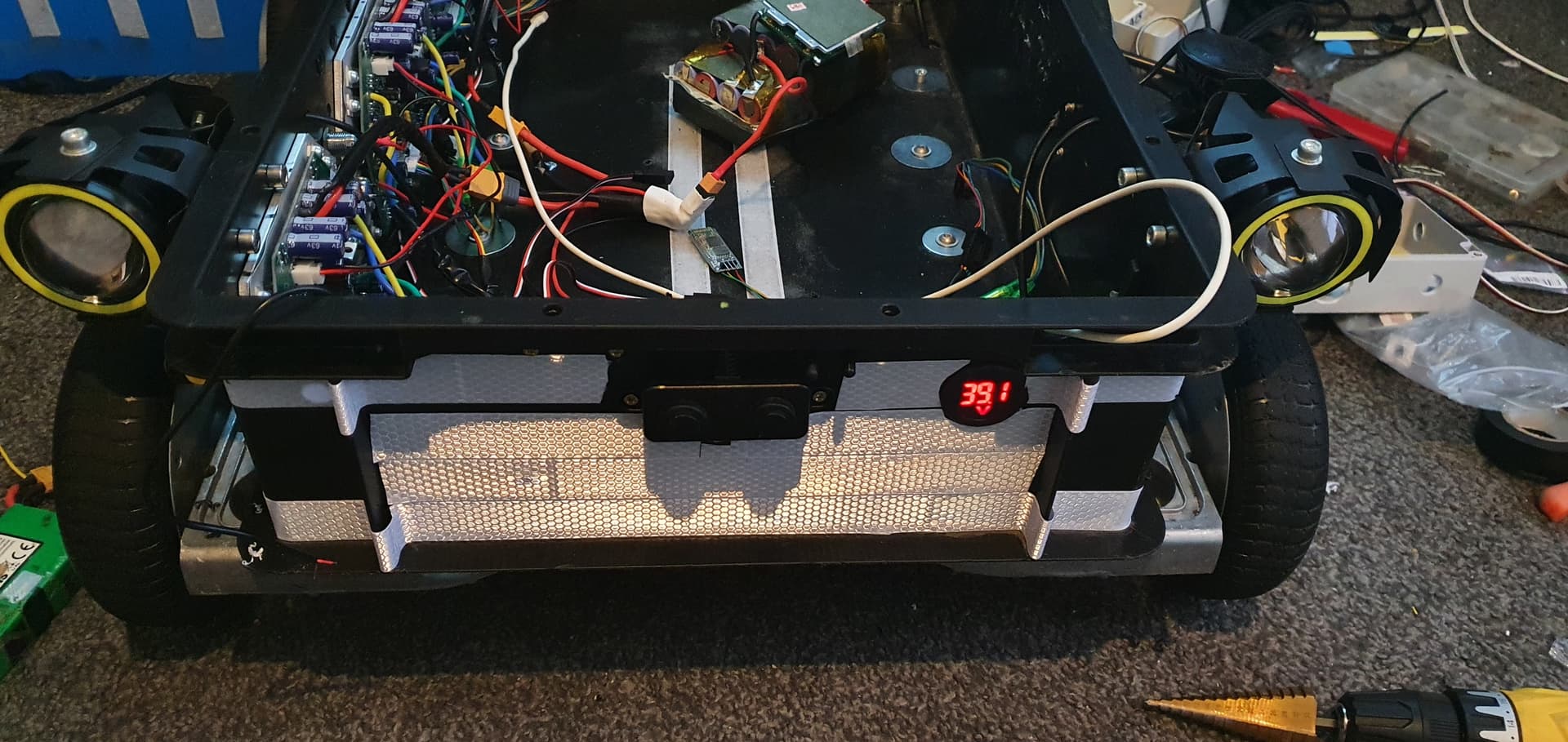
Got it up and running again, replaced the 3 motor controllers, added a 10a 12v step down regulator for auxiliary systems then added some lights via a bank of relays running from gpio pins.
Its running a Vl53l1x on the front under the sr04 its a great improvement over a sr04.
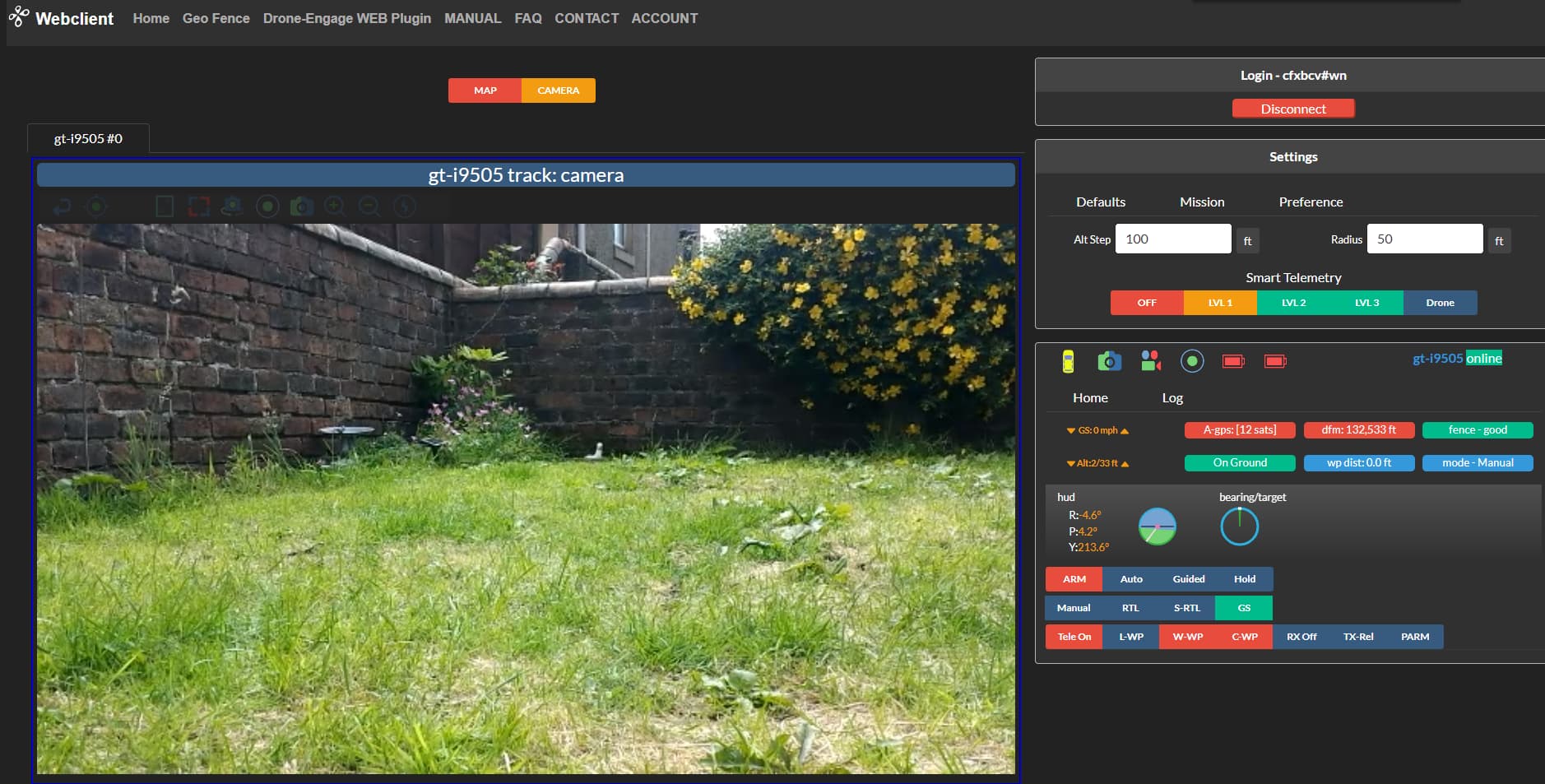
Been driving it around the garden using andruav for video via a samsung s4. There are some issues with telemetry just now so i was just using my regular rc rather than my joystick over mavlink.



2 Likes
nice work! I have some nonstandard hoverboard controllers but can’t get pwm working on them and am attempting to develop with serial control via esp32 companion computer (mavlink) right now.
1 Like
have you got the split mainboard version? i have one but i couldnt get it working.
No, I have a nonstandard single motherboard which works fine standalone from arduino on serial but does not allow me to reflash if I program with PWM version of Feru’s firmware.