I have such connectors, but I’m sorry to use them for this. I’ll try mt30.
MT30 will probably be enough, I usually use MT60 on ebike motors that use a bit more power.
I limit the current to 10A at the firmware level, so I’m not worried.
1 Like
drives much better after halving the steering rate.

I have a range extender trailer for my Ebike thats built using the same 600x400mm crates that im using for the rover so the generator slots in directly on top so of course i had to test it.

1 Like
I bought another faulty hoverboard. totally dead and wont power on even with a different battery so I suspect its the TIP127 main power transistor not letting power into the board, apparently its a common fault on them. so i have ordered a pack of them to hopefully get the board up and running and get 4WD.
As a bonus its got a new battery in it from the previous owners attempted repair.
I have been looking at the hoverserial.ino arduino serial interface and it does provide a lot of very useful telemetry from the controller and a nice serial interface for sending it RC commands.
this is essentially your 2 channels getting sent to the hoverboard
int16_t steer;
int16_t speed;
what it thinks the 2 channels are getting commanded to do
int16_t cmd1;
int16_t cmd2;
wheel RPM
int16_t speedR_meas;
int16_t speedL_meas;
voltage and temperature
int16_t batVoltage;
int16_t boardTemp;
native support would be nice but in the mean time an arduino adapter might be the way to go or even straight lua.
This winter I tried using uart, only on esp32; In the receiver on the display I got the speed, voltage.
1 Like
Good news, the first hoverboard that i managed to short out came back to life! turns out it was just 2 damaged mosfets on one of the motor drives that had shorted out, swapped them out with 2 from an old ebike controller and its back up and running!
2 Likes
Got all 4 motor running ! I also made a proper wiring harness so the 18v feed goes into the UBEC via a diode from each board to run the receiver so i can run either pair of wheels.

Done some testing at the beach on soft sand, it handles it surprisingly well
Limited throttle

Full power

I’ve often wondered, could these motors/ controllers swing a prop?..
1 Like
I suspect you would overheat the motors with a high sustained load like that.
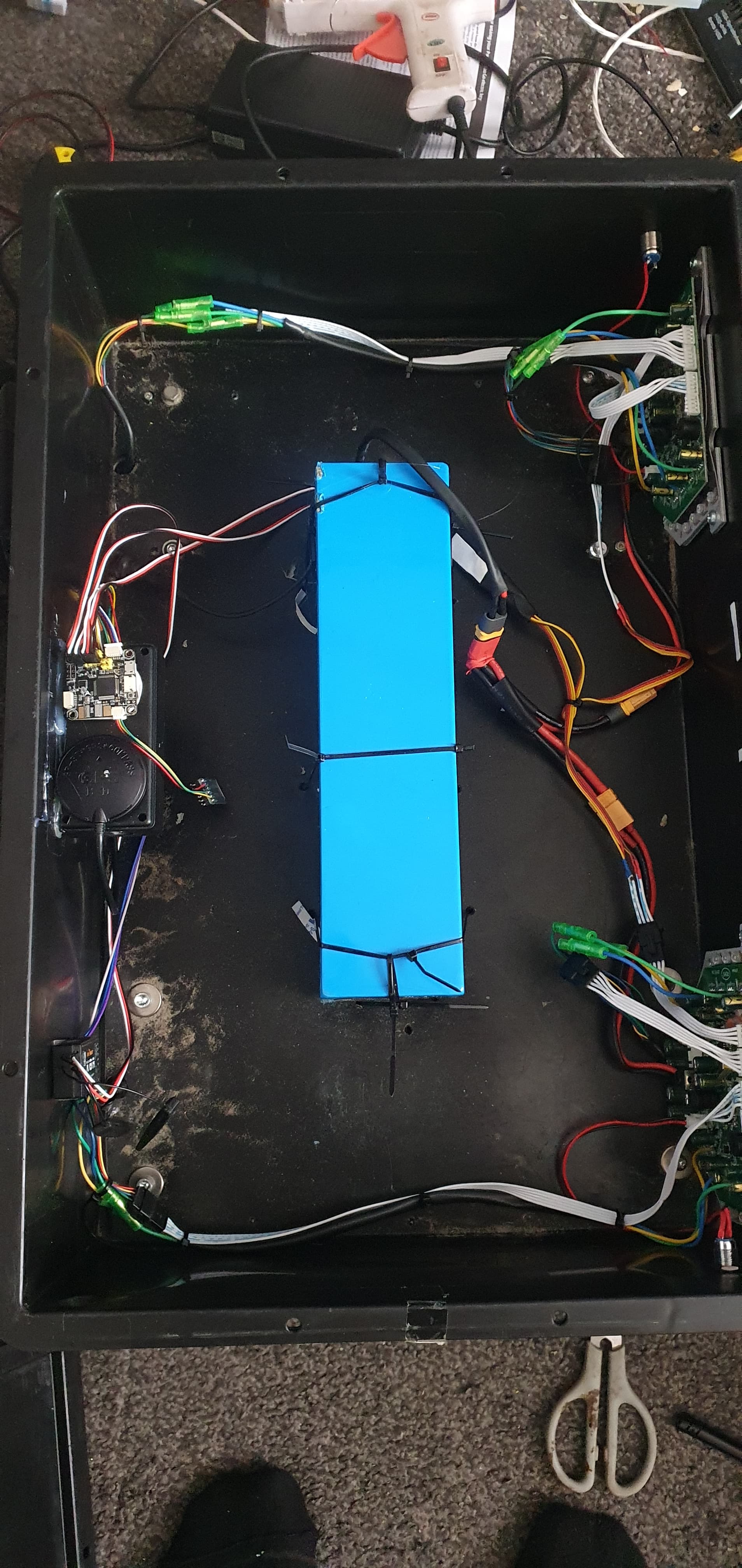
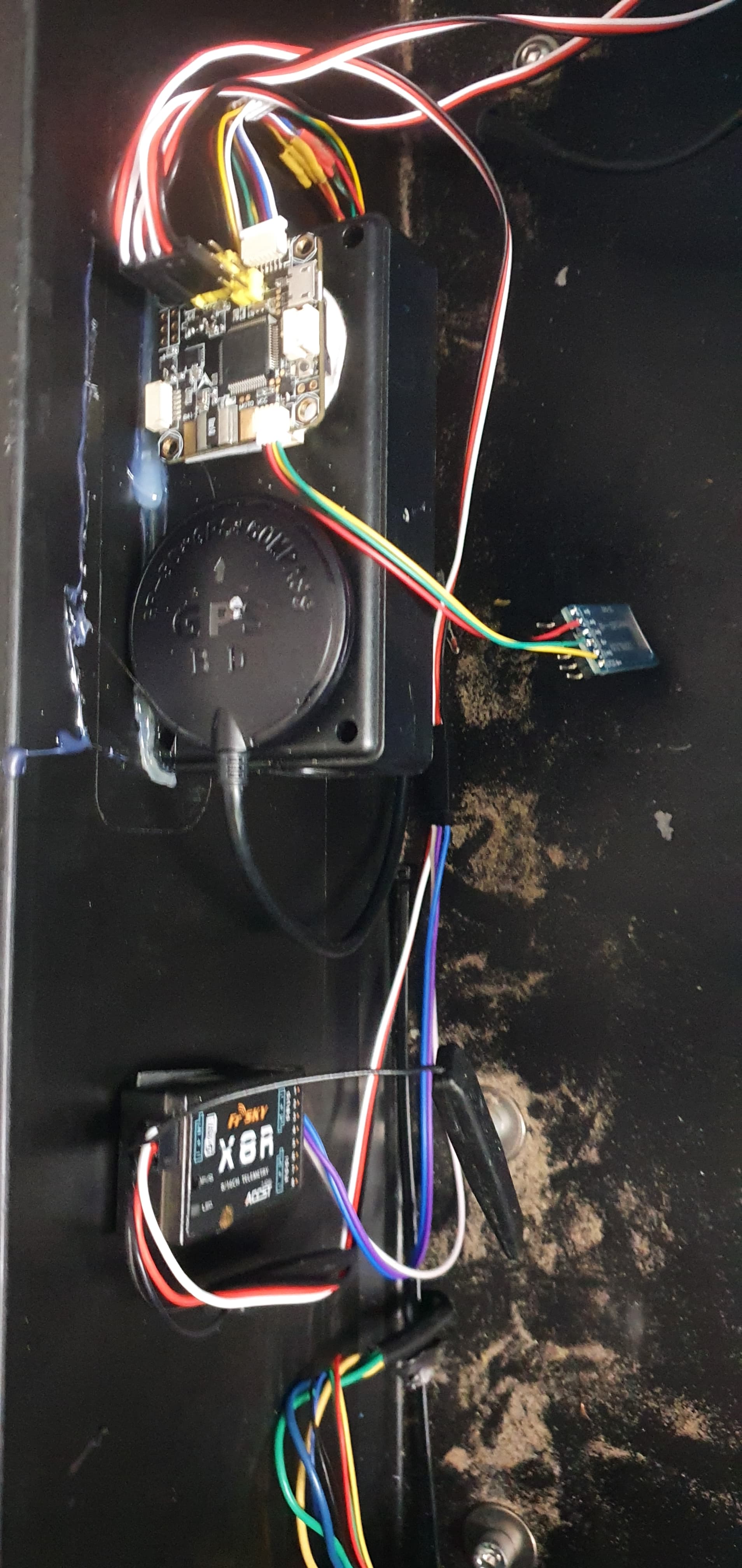
Got a flight controller installed, its a spare omnibusf4pro i had for a vtol. I cant use the built in power sensors as im runing a 13s 20AH battery so il have to figure out something else at some point, il probably just replace it with something better suited like a pixhawk or matek f7. its got frsky passthrough telemetry and a HC-05 bluetooth module for uploading missions.
Unfortunately the weather is not cooperating so i wont get to test to til probably tomorrow.
Waterproof sr04 on the front to test avoidance.

First test with the GPS

2 Likes
I tried on ELSR and Pixhawk, the range was more than 1000 meters (along with telemetry). The ESP-NOW managed to manage 500 m.
1 Like
@Yuri_Rage has a mavlink esp-now bridge, im wondering if it can be combined with some mavlink RC override code and ppm or SBUS input to build an RC / telemetry system out of it, it would be ideal for rovers.
my test pilot approves the rover

2 Likes
How about the ESP8266 wifi telemetry — Copter documentation with a joystick ? - More or less the same thing as ESP-Now
Either would work, its possible to do it with mission planner but having a laptop in the middle just to convert a transmitter to mavlink is a bit excessive.
I just had a look, the option is there but mission planner for android is not the most stable software, if it crashes you would loose your rc control.
I was thinking just to change missions etc rather than control, which would be still under RC control