Hello everyone!
I have a trouble with setup px4flow on my quad via i2c. I read the article about setup of px4flow and succesfully flashed firmware from it and calibrated good focus of the px4flow lense, but further I had no success.
I am not sure what exatcly I am doing wrong.
I have read this and these posts.
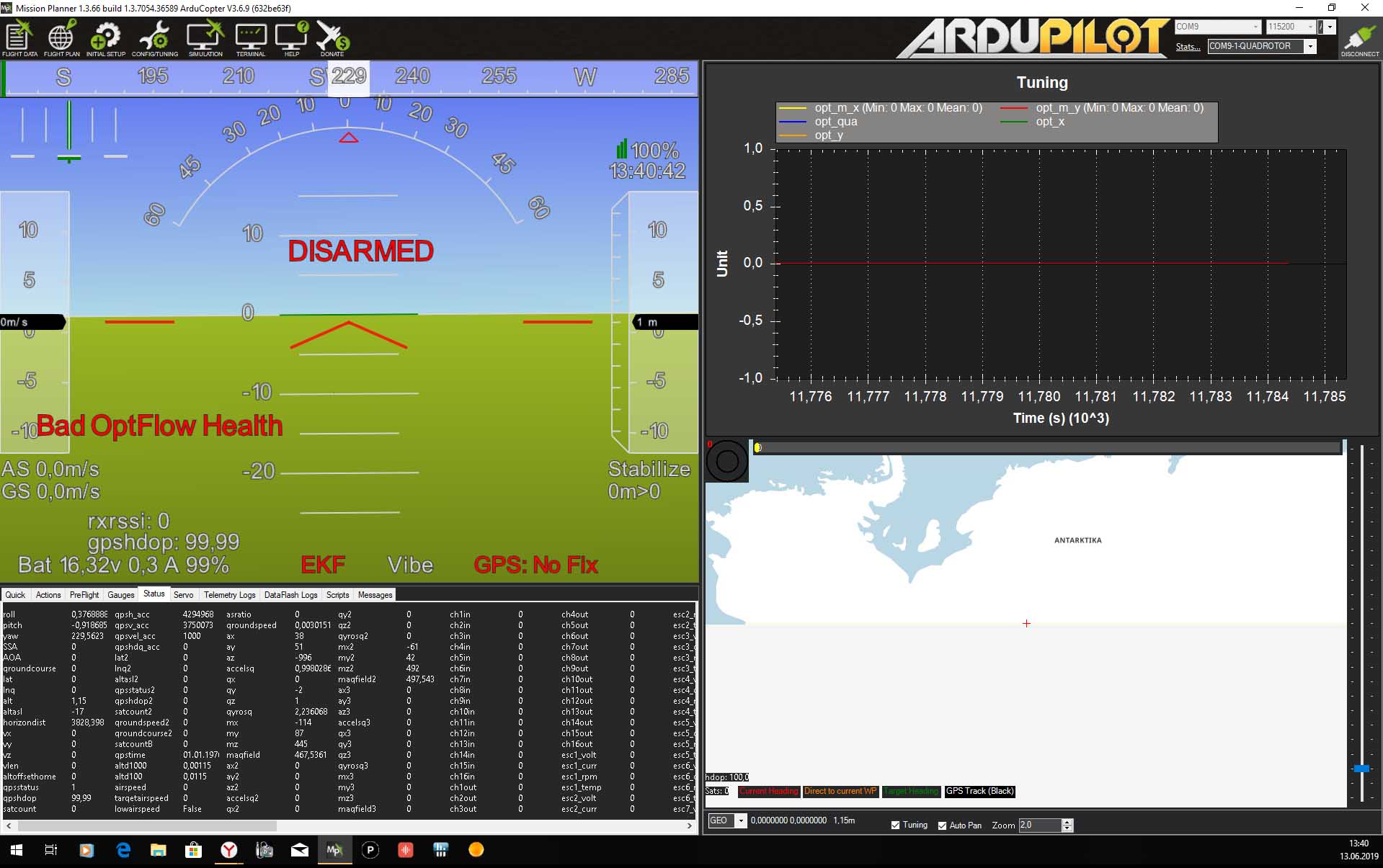
After reading I added separate power and gnd to i2c hub from 5v PDB, lights on the px4flow was flashing, but I had all rellated params is zero( I mean opt_x, opt_y).
Also it’s not clear which adress I have to set as FLOW_ADDR. If this value = 0 nothing happening. I found from source code that by default i should be 0x42, and set to FLOW_ADDR as 66, but it didn’t help, I see bad optflow health that’s all. Please advice some way to solve it.
Finally I got some data from px4flow thanks a lot! What I did: used default address l, separate power source, and leave some space under my quad. So next question about orientation of px4flow, I see xyz axes print on px4flow, and x axis hasn’t the same direction as my flight controller…
Hi again @ppoirier, could you please shed light on some not clear parts on the px4flow wiki. The problem is the missing of any values in logs named as EKF5.meaRng.
I found at the begging of px4flow wiki that:
although the sensor may be supplied with a built-in Maxbotix LZ-EZ4 sonar to measure height, this has not been reliable enough over a range of surfaces in testing.
Does it means that missing of EKF5.meaRng is ok? and ardupilot just ignores my px4flow inbuild sonar? or such value should be exists anyway?
Also if I have to have separte lidar maybe you know a cheaper version than LightWare SF10b(300$ it’s too much to my hobby:sweat_smile:)