I know this topic has been reviewed previously. I have been reading the wiki and what guidance I can find but so far, No Joy.
Some background:
Original 3dr Pixhawk
Copter 3.5.5 Y6 Stable set up working well without the PX4Flow.
Board flashed with Px4flow-kit-06Dec2014 via Mission Planner and again with QGC.
Board connected to computer via USB flashed and focused lens. Able to view data output via QGC with the direct USB connection to the board.
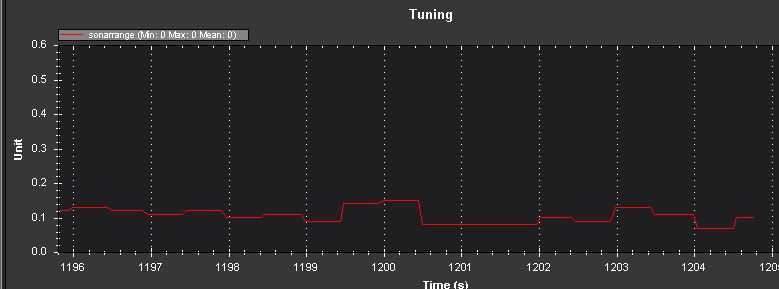
Lidar Lite V2 (blue label) connected to Pixhawk via PWM. Data reports as expected. After connecting the PX4Flow, I now get a startup message “check range finder.” At startup Lidar is 0.16 meter and typically passed the prearm check without lifting, as Im having trouble, I now lift the drone at startup. The message continues anyway, but the data is still consistent.
The PX4Flow board is powered from the same bec that powers the lider when working on battery, otherwise powered from the servo bus when the pixhawk is powered from the USB.
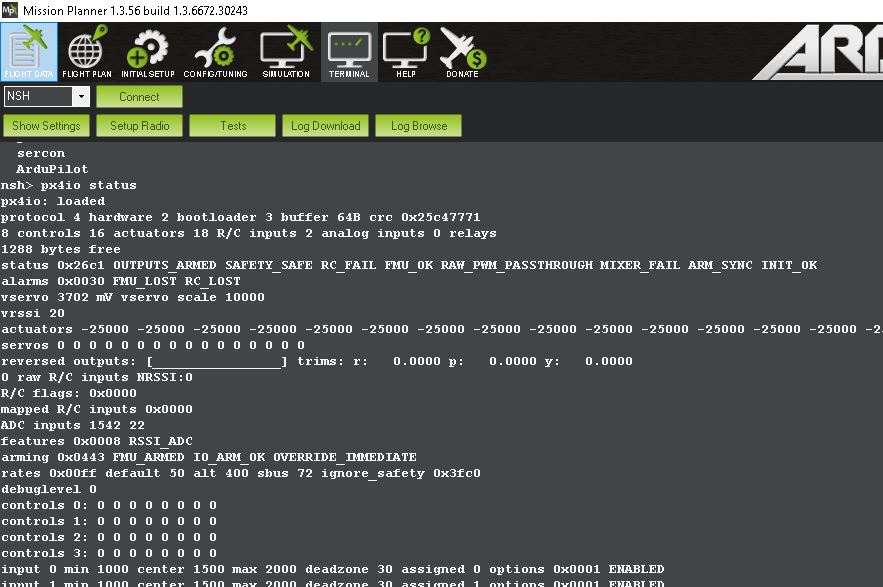
Regardless, of the power source, or the start up order, I can enable the PX4Flow in Mission Planner, but I cannot get any reading ever on opt_m_x, opt_m_y, opt_x, opyt_y, or opt_qua. At startup I get the message “bad optical flow health.”
I have been studying this issue for weeks, even purchased an additional px4flow board, but the results have always the same. First board did not include the sonar sensor, now I’m working with the Holybro board with the sonar sensor. I see just now the advice to remove or disconnect the Maybox sonar? I can try that but my rangefinder data looks ok.
Dataflash log usb power:
 I know this topic has been reviewed previously. I have been reading the wiki and what guidance I can find but so far, No Joy.
I know this topic has been reviewed previously. I have been reading the wiki and what guidance I can find but so far, No Joy.
Some background:
Original 3dr Pixhawk
Copter 3.5.5 Y6 Stable set up working well without the PX4Flow.
Board flashed with Px4flow-kit-06Dec2014 via Mission Planner and again with QGC.
Board connected to computer via USB flashed and focused lens. Able to view data output via QGC with the direct USB connection to the board.
Lidar Lite V2 (blue label) connected to Pixhawk via PWM. Data reports as expected. After connecting the PX4Flow, I now get a startup message “check range finder.” At startup Lidar is 0.16 meter and typically passed the prearm check without lifting, as Im having trouble, I now lift the drone at startup. The message continues anyway, but the data is still consistent.
The PX4Flow board is powered from the same bec that powers the lider when working on battery, otherwise powered from the servo bus when the pixhawk is powered from the USB.
Regardless, of the power source, or the start up order, I can enable the PX4Flow in Mission Planner, but I cannot get any reading ever on opt_m_x, opt_m_y, opt_x, opyt_y, or opt_qua. At startup I get the message “bad optical flow health.”
I have been studying this issue for weeks, even purchased an additional px4flow board, but the results have always the same. First board did not include the sonar sensor, now I’m working with the Holybro board with the sonar sensor. I see just now the advice to remove or disconnect the Maybox sonar? I can try that but my rangefinder data looks ok.
dataflash log usb:
I know this topic has been reviewed previously. I have been reading the wiki and what guidance I can find but so far, No Joy.
Some background:
Original 3dr Pixhawk
Copter 3.5.5 Y6 Stable set up working well without the PX4Flow.
Board flashed with Px4flow-kit-06Dec2014 via Mission Planner and again with QGC.
Board connected to computer via USB flashed and focused lens. Able to view data output via QGC with the direct USB connection to the board.
Lidar Lite V2 (blue label) connected to Pixhawk via PWM. Data reports as expected. After connecting the PX4Flow, I now get a startup message “check range finder.” At startup Lidar is 0.16 meter and typically passed the prearm check without lifting, as Im having trouble, I now lift the drone at startup. The message continues anyway, but the data is still consistent.
The PX4Flow board is powered from the same bec that powers the lider when working on battery, otherwise powered from the servo bus when the pixhawk is powered from the USB.
Regardless, of the power source, or the start up order, I can enable the PX4Flow in Mission Planner, but I cannot get any reading ever on opt_m_x, opt_m_y, opt_x, opyt_y, or opt_qua. At startup I get the message “bad optical flow health.”
I have been studying this issue for weeks, even purchased an additional px4flow board, but the results have always the same. First board did not include the sonar sensor, now I’m working with the Holybro board with the sonar sensor. I see just now the advice to remove or disconnect the Maybox sonar? I can try that but my rangefinder data looks ok.
Thank You for any advice.
Dataflash log, USB
Dataflash log battery