Another problem I’m having is that the Graupner HoTT MX-16 only controls the servo, but not the motor.
I’m assuming that the wrong PPm encoder might have been installed by the previous user. I’d love to tell you the type of the encoder, but there is no brand label on it.
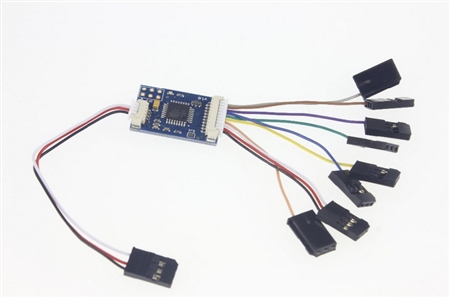
It looks like the one in the image below, but with a solid case that says “PPM Encoder” and a short description of the inputs and outputs.
No matter what I change in the settings of the radio control, I can only use the left joystick with a left-right movement to control the servo. The motor cannot be controlled with top-down on the left joystick or any movement of the right joystick.
Do you have an idea what could cause this problem? The PPM seems to be plugged in correctly.
You do not really need the PPM encoder. As I wrote in a previous post, the Graupner receiver can output PPM on channel 6. It is called SUMO by Graupner. You can configure it using the telemetry menu in the transmitter. It also can output SUMD, a digital serial signal. You should rather use this, than analog PPM/SUMO.
The servo output does always work, the motor output needs the rover to be armed, prearm checks to be passed and perhaps a safety button to be pressed.
For testing you should set BRD_SAFETYENABLE 0
ARMING_CHECKS 0
You should also set one switch on your transmitter to ARM/DISARM to avoid arming with the steering/yaw input.
So, can I just remove the PPM encoder from the Graupner receiver and the Pixhawk 4 without needing any other connections? And then just use the SUMO signal for CH6 in the telemetry settings of the RC?
That’s what I would do, but my father (who does railway modelmaking in his free time, just not rc models + has work experience with electronics) believes that there is still a connection necessary.
Of course you will need a 3pin cable connection between CH6 of the receiver and the RCIn of the Pixhawk 4. Just no PPM encoder in between. And try to use SUMD, instead of SUMO. You will have a reliable connection, much less jitter and up to 16 channels, depending on the transmitter (8 Channels with the MX-16). You will have to connect the receiver configured with SUMD to the DSM/SBUS port of the Pixhawk 4.
Okay, so I’ve changed the connections and set SUMD at CH6 to yes.
The servo can now be controlled by up-down movements on the right joystick.
I haven’t tested the motor yet with the PC connected. The paramaters you’ve named in your earlier reply, do they relate to ArduPilot with MissionPlanner as the GCS or would it work for QGC as well (because that’s the one I’m using)?
The parameters are part of the ardupilot firmware and therefore independent from the GCS software you use.
To get the right sticks move the right input, you have to match the RC channel map of the transmitter to the RC map ardupilot expects. Graupner uses TAER (Throttle, Aileron, Elevator, Rudder), while Ardupilot uses AETR by default. There are RCMAP_XXX parameters to change ardupilots default channel map. I usually use the right stick (Mode 2 transmitter), to control throttle and steering and the left stick to control a camera gimbal for example.
So for a Mode 2 Graupner transmitter (left stick up/down has no centering spring), with TAER channel order, you have to set the following to use one stick for driving around:
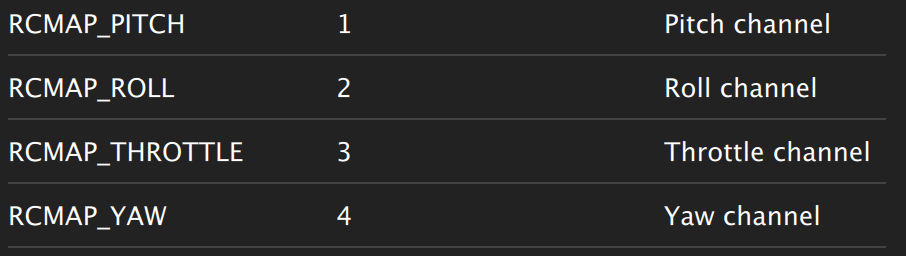
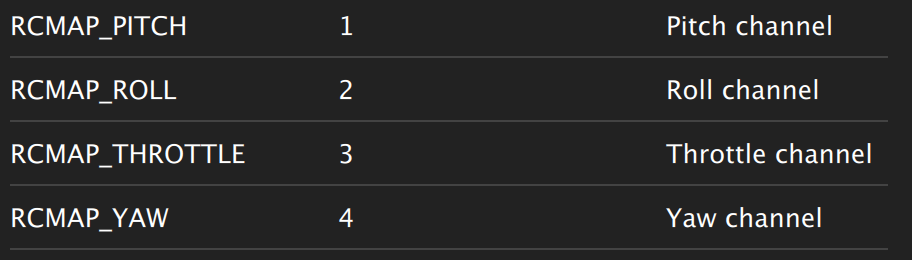
RCMAP_ROLL is 1 must be 2 (Ardurover takes its steering input from the roll channel, not yaw)
RCMAP_PITCH is 2 must be 1
RCMAP_THROTTLE is 3 remains 3 (Spring loaded right stick up/down controls throttle)
RCMAP_YAW is 4 remains 4
Okay, so I made an error. I have it connected to the PPM/RC port. The only cable that fits the correct port is a yellow/red/blue/black one, but it doesn’t have a proper end to connect to the receiver.
Do you have any idea what kind of cable I would need? The only problem seems to be the cable right now, as I don’t have one that has one end for the port and another for the receiver port.
There is none that matches. It would need a four cable adapter for the port of the Pixhawk 4 and a three cable adapter for the Graupner receiver. I can’t find any that fits both.
I would add some pictures of the cables I have but the Google photos upload is being ultra slow rn.
There should be a cable just like the PPM cable, same colors, with a 4 pin connector for the Pixhawk with a three wire cable in it, so one pin is free.
As far as I’m currently concerned, there is no matching cable among them.
Update: Nevermind, I found a cable just like the one you described. It was among the hundreds in packages. I will do tests tomorrow; it’s almost 9PM here and I don’t want to bother my family with the motor sounds.
I will tell you about it after testing it tomorrow.
@count74 Okay, so the Graupner receiver is directly connected to the Pixhawk 4 now via the cable you had named (black red yellow, one inactive pin on the side of the Pixhawk).
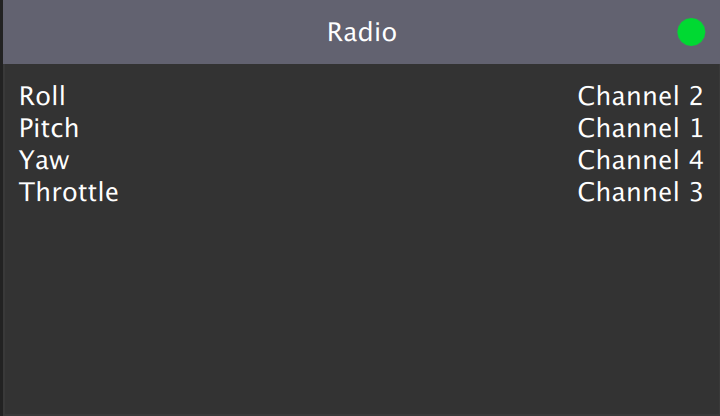
The parameters in QGC/ArduPilot are the same as yesterday; they match with the ones of the Graupner (as you had written).
Now, if I try to control the motor with the joysticks of the transmitter, nothing happens.
The servo can be controlled with an up-down movement of the right joystick.
Using the motor tests under motor setup of QGC, the motor can be controlled with slider A.
In the Graupner MX-16, under Servoeinst, only S1 is at 100%, S2-S8 are at 0%. Under Gebereinst, E5 = Geb. 6, E6 = 1, E7 = 3, E8 = Geb.8. After the numbers under E6 and E7 there are also some block symbols. For E6, the top of the block is black, the rest clear, and for E7 it’s the bottom that’s black with the rest being clear.
I’d send you some pictures, but the akku is running low rn.
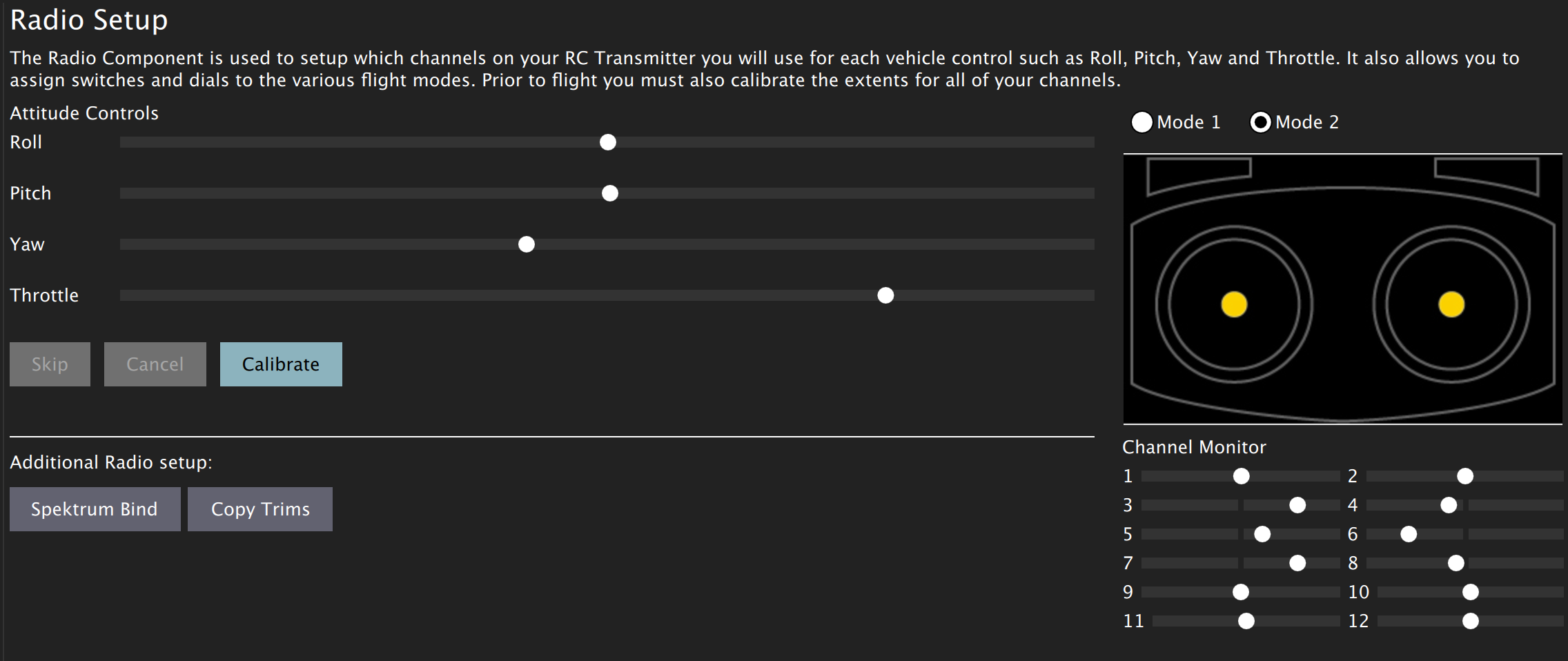
First thing to check would be the radio calibration screen, to see if the right sticks move the right inputs.
Throttle should be the right stick up/down.
Roll, right stick left/right.
Pitch, left stick up/down.
Yaw, left stick /left/right.
It has been many years since I last used Graupner gear, so I can not be of much help regarding the transmitter setup. I always found it unnecessary complicated.
Perhaps it would be best, to start with a new model in the transmitter, so no unknown settings can mess things up.
Next Monday I will be near the institute again for a day, maybe my professor can show me what I need to calibrate in case I don’t get it running before that.
Then there is something wrong with the RCMAP parameters.
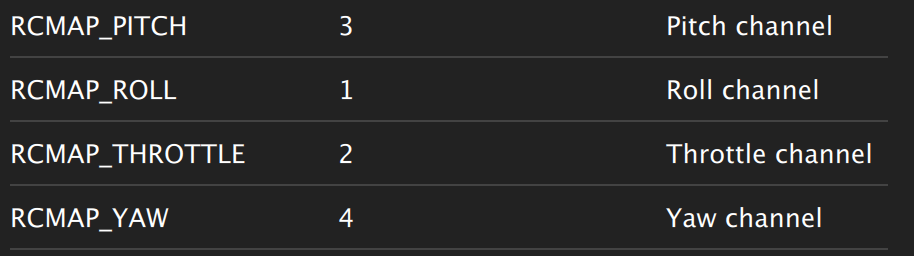
If the transmitter is set to Graupners default channel order TAER:
RCMAP_THROTTLE 3
RCMAP_YAW 4
RCMAP_ROLL 2
RCMAP_PITCH 1
Only right joystick up-down movement does anything (moving the servo) … every other movement does nothing.
When I’m in the radio setup, the following things happen:
Right, up-down: roll slider dot moves
Right, left-right: yaw slider dot moves
Left, up-down: throttle slider dot moves
Left, left-right: pitch slider dot moves
So, the GCS notices that I’m moving the joysticks on the RC. It’s just seems that between the Pixhawk 4 and the Graupner receiver, only the roll movement is being translated into a vehicle movement.
The settings should be right for TAER Mode 2. Perhaps the one who setup the rover before changed the transmitters channel order. Right stick up/down input (pitch) moving roll, matches AETR channel order. Try changing RCMAP_Throttle to 2 and Roll to 1, Pitch to 3.
Left, left-right moves the servo, any other movements on either joystick do nothing.
Changed it back to original since it didn’t have any real effects, unfortunately.
Edit: Would it help you if I posted pictures of the other settings in the GCS? Maybe it’s another setting that seems unrelated that’s messing things up?