I also told my professor that I would like him to check upon the Graupner on Monday, if possible. It’s kind of frustrating, especially since my main task is not the setup of the Graupner.
Do not change it back. You obviously want steering by a left/right movement. So, if by setting the RCMAP to AETR (ardupilot default) results in the left stick controlling the servo/steering, it means the transmitter is not set to Mode 2, but probably Mode 4 or 1
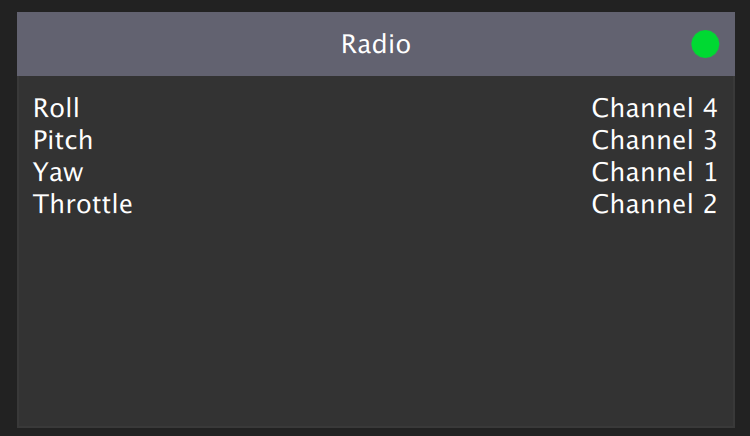
If it is already Mode 2, leave it as it is. Just swap the numbers between RCMAP_YAW and RCMAP_ROLL. Then you should be able to control the steering with the right stick left/right. Also make sure the right stick uo/down moves the throttle bar in the radio calibration screen.
It demands “geb. Empf.” (giving receiver). If I select that with BIND, it searches for a while and then just returns “- - -”. It seems that the binding process does not work.
Looking at the settings (Flächenmix and Freie Mix), it also seems that there are no active mixers.
@count74 Connecting the receiver directly with the ESC made things work.
Right left-right controls the steering, left left-right the motor.
Could it be that there is still something that needs to be set up with the Pixhawk4 or its power module? Or do I have to create a branch so I can connect the ESC with both the board and the receiver?
The servo output does always work, the motor output needs the rover to be armed, prearm checks to be passed and perhaps a safety button to be pressed.
For testing you should set BRD_SAFETYENABLE 0
ARMING_CHECKS 0
You should also set one switch on your transmitter to ARM/DISARM to avoid arming with the steering/roll input.
Okay, changed the wiring back to original. How do I set the switches on my transmitter to ARM/DISARM though?
With the improvised wiring, I can control both servo and motor via the RC but not the motor with the GCS. If it’s the “normal” wiring, I can control both with the GCS but only the servo with the RC.
So I think a branch where the ESC is connected directly to the receiver and the Holybro board is necessary though.
No branch is necessary. Receiver to autopilot, autopilot to servo and ESC. All you would get with a branch is an ordinary RC car with expensive payload.
You have to make it work the “hard” way. Ardupilot comes with a learning curve, but it is worth it.
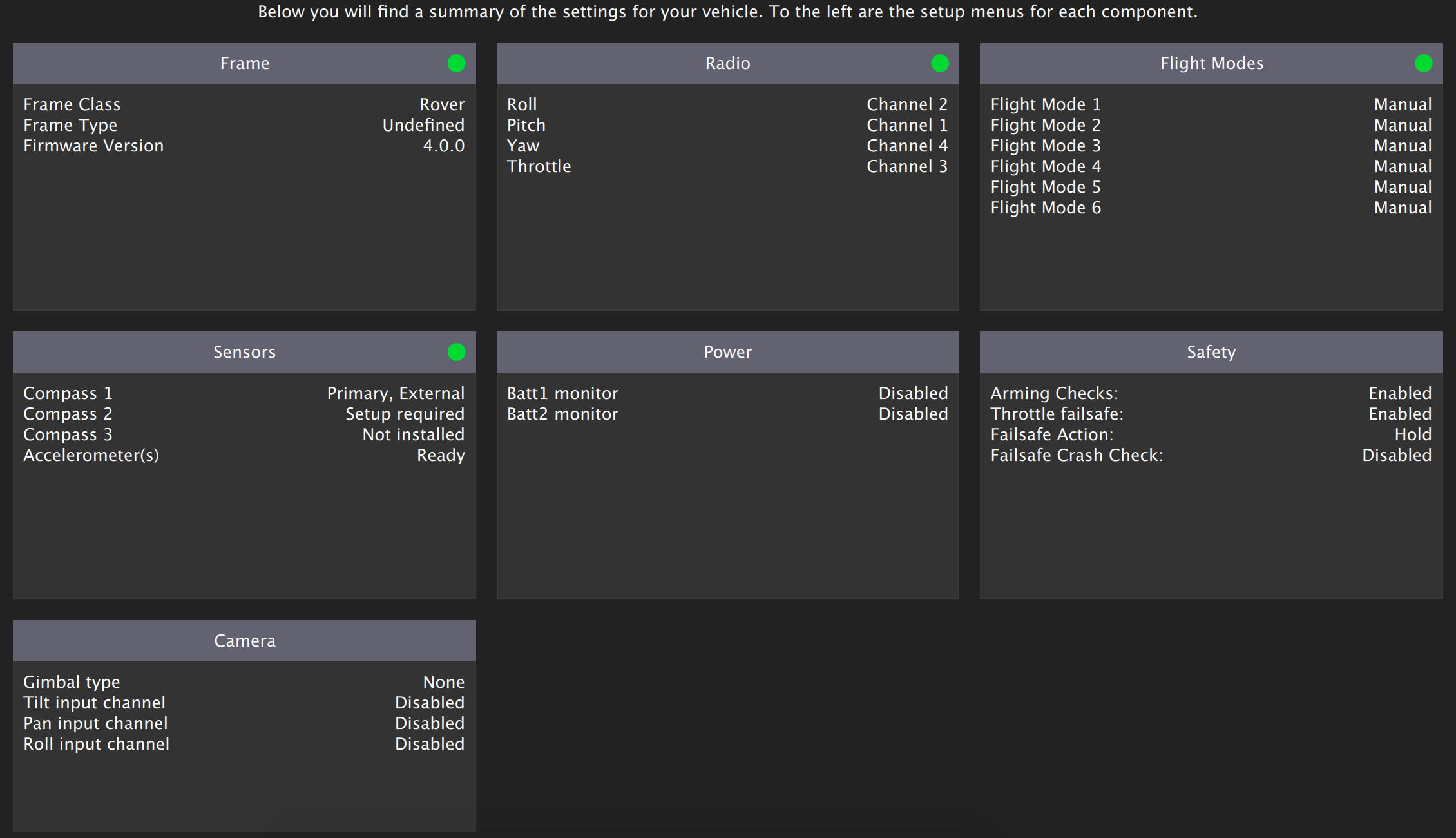
Could you upload a parameter file with the current settings, so I can have a look and send back a version that is working hopefully. I never saved the parameters to a file with QGC, but it should be possible.
In QGC, connect to the rover, click on the gears symbol, then parameters, then on Tools in the upper right corner. There you can save the parameters to a file.
It looks like there is no other RC input channel calibrated except for the 4 main inputs. You will need at least a 3 position switch on the transmitter to select flightmodes. Default flightmode channel in ardurover is channel 8. There are ways to mix a 2 and 3 position switch to get a 6 flightmode switch, but it is a bit complicated with Graupner. You will also need a 2 position switch for arming the rover, on channel 7 for example. Default way of arming/disarming is throttle low, steering input right for 5 sec. Disarming is steering input left. This is is problematic for rovers, because it may disarm doing sharp left turns. So set
ARMING_RUDDER 0
after you have assigned a 2 pos switch to channel 7 in the transmitter and set
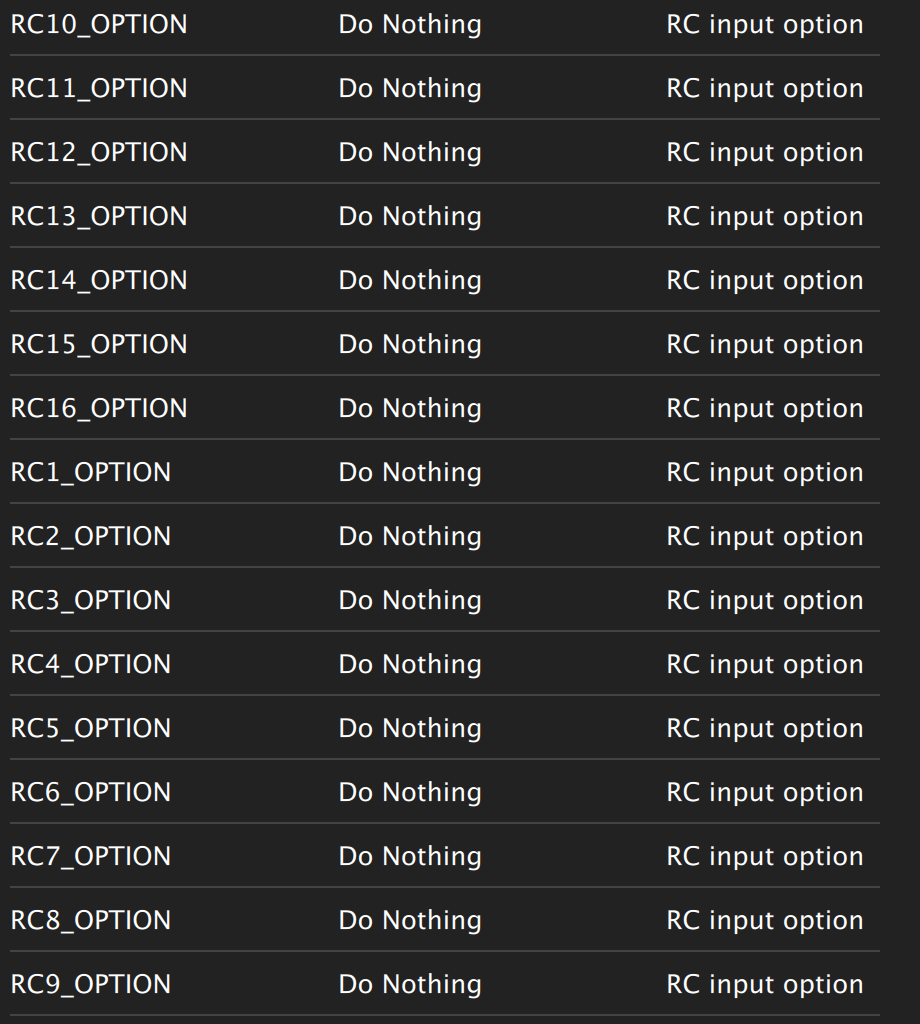
RC7_OPTION 41
For testing you can also set
ARMING_REQUIRE 0
this starts ardurover in armed state. This should be set back to 1 after bench testing is complete.
Thank you, but could you explain more in detail the part with assigning a 2 pos switch to channel 7 in the transmitter?
SW8 seems to be free on the Graupner; the other switches apparently have already been assigned to functions specific to the research catamaran (such as rotating the sampling discs), and I don’t want to mess up these presets.
So, how exactly do I assign the switch? Is it somewhere in the transmitter’s menu or do I have to do it with the GCS? I’m unsure since I have no experience on this matter.
Thank you already in advance for your answer and help!
If the settings for this model memory are needed for another vehicle, you should create a new model. I found my old MX-12 in a box, so I can now refresh my memory on how to program a Graupner transmitter… I do not know how Graupner may have changed their programming in the meantime, but most of the settings should be the same.
Select a free model memory slot and create a model with the airplane preset. Under “Grundeinst” change “Steueranord” to 2, leave everything else as it is. Power up the receiver, select “geb. Empf.” in “Grundeinst”, press the SET button on the transmitter and the small button on the receiver with a pointy object. “Binden” should be blinking in the display and then be replaced by “E06”. If it does not, repeat the procedure. Sometimes it does not work if transmitter and receiver are to close together.
Then under “Gebereinst” select E7, flick the 2 position switch you want to use for arming to set it for channel 7. Do the same with E8 and a 3 position switch. You can assign switches to the other “Ex” too, so you can use them for other rdurover functions later. Then redo the radio calibration in QGC, moving all assigned sticks and switches.
Thank you, I did that, it’s just that mid radio calibration, I get an error that the vehicle is armed. The LiPo is not connected rn, but the Pixhawk’s light is green.
I have done everything as described, but I still cannot control the motor with the Graupner. The servo can be controlled with a left-right movement on the right joystick.
Sorry, my mistake. You should only set ARMING_REQUIRE to 0 after all calibrations are done. Some things do not work if the vehicle is armed for safety reasons.
In the parameter file you send, there is still ARMING_RUDDER set to 2 and ARMING_REQUIRE 1.
All RC channel inputs except for the first 4 still look uncalibrated.
RC7_OPTION is still 0.
You can also arm the rover from the QGC primary screen.