I had a look at the log you posted before and the rover never drives at a constant speed. The speed fluctuates all the time and the cruise learning starts and stops(fails) while the rover is accelerating/braking. The one time the cruise learning worked, it learned the throttle/speed while the rover was still accelerating. The GPS HDOP also gets better over the duration of the drive. You must wait a while till the rover has a solid GPS fix. And you need enough space to drive the rover in a straight line for 10 meters or so.
1 Like
Okay, we will try to test the vehicle on an empty parking lot on the weekend, it has a lot of space, it’s in a commercial area and the other buildings aren’t too close by.
And to Sebastian’s point if you are using telemetry wait for the message “EK2 IMU1 is using GPS” before driving.
1 Like
Hello again!
I have done the Cruise Learning today, and CRUISE_SPEED is now at 1.9 m/s and CRUISE_THROTTLE is at 13%. Here is the log data: https://www.dropbox.com/s/yhn6q9kir8lmd0n/2020-10-11%2009-46-05.bin?dl=0
Oddly enough, mode 7 did not work today, so we did the cruise learning with mode 2 (left joystick controls every movement).
Those values look good.
I did not get the part with “mode 7”…
I might have worded this badly, sorry. In the Graupner, there are several models for the vehicle. Model 7, which I normally use, wasn’t working at all this morning, so we switched to model 2, which worked.
UPDATE:
Model 7 worked again. I don’t know why it didn’t work yesterday, but it doesn’t matter; cruise learning worked.
Next up are ACRO and STEERING mode. I’m going to read myself into that and watch some tutorials; if you have any resources on the matter, it would be very appreciated if you could share them with me.
Also, what exactly is the PWM unit? PWM is electrical impulses over time t, so is it ms-1 (1/ms)? The parameter section in MP only mentions ms.
So … MissionPlanner only mentions ms as the unit for the PWM signals.
I think it should be 1/ms or ms-1 as it is about the number of impulses over time.
Or is the PWM signal a frequency and needs Hz as a unit?
I’m unsure about it, but having the proper unit is very important to me and for my work.
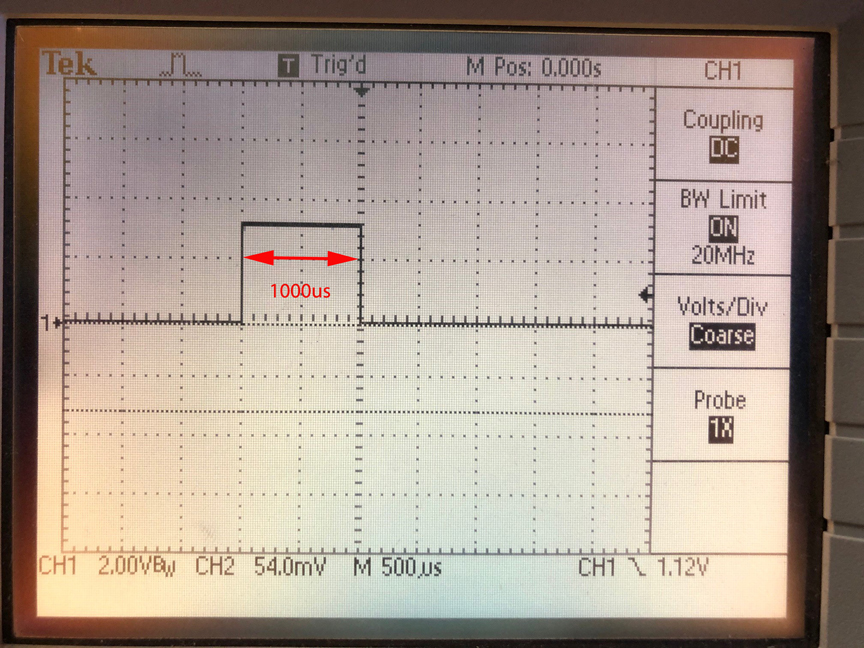
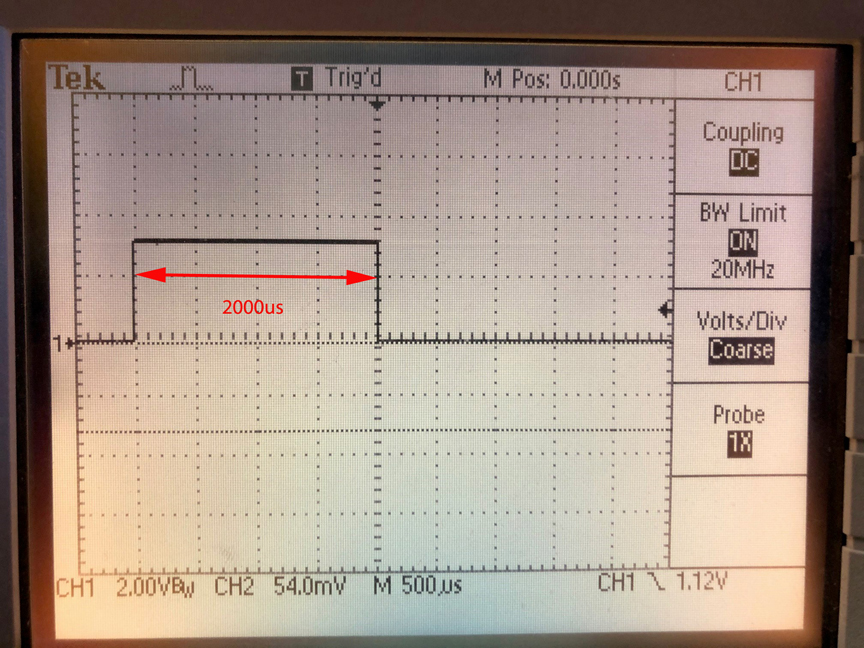
Pulse Width Modulation, it’s typical unit is µs. This is the pulse width in time not number of pulses over time nor frequency.
Had the O-scope running so some examples.Note the Horizontal axis scale 500us per Division:
1 Like
Ah, thank you very much! I didn’t find any source which told me, and from earlier messages I was confused about the us unit because I have learnt to use µs exclusively.
It is common to use “us” for microseconds, because it is not possible to write the correct sign on some systems. I have no idea where to find it on my android phone for example. 
µ
Ampersand symbol # 181 ;
I have to write µε (micro strain) several times a day from multiple devices for my job 
On my android phone I have it when I hold the π symbol, then it will appear in the list.
Thank you both! Found the symbol on my PC and my android phone!
So, I tried to tune the turn rate in ACRO mode today. I remembered to do everything that Mackay did in his video, but I forgot the most important thing: changing the mode from MANUAL to ACRO … 
I’ll charge the LiPo now, and I try again later, even though I don’t have as much space here as I had on the parking lot I was on this morning. I don’t think that should be an issue though; ACRO mode seems to focus more on turns than on long straight lines.
I tried ACRO again at home. As soon as I set the mode to ACRO, the rover began moving on its own, even though I did not move the sticks. I couldn’t set the parameter GCS_PID_MASK to either throttle (1) or steering (2) – instead, I received an error message that the parameter could not be written.
Since I have no idea why this happened, I am asking you for help.
Here’s the bin file: https://www.dropbox.com/s/eak2sbgy8lbqfkl/2020-10-18%2009-49-09.bin?dl=0
As always, thank you already in advance for your help!
Was the rover armed when you tried to save the parameters? I would try it again while the rover is disarmed.
The ATC_SPD_I parameter can cause the vehicle to move on its own. Ardurover does not stop PID calculation when the throttle is 0, so the I-term can wind up when the rover should stand still.
This is my experience at least. I did not look at the source code.
So before you reached this point you determined the ACRO_TURN_RATE by driving in Manual Mode turning and looking at the Live Tuning screen Gyro Z?
@count74 Yes, the rover was armed when I tried to save the parameters. Okay, I will try again tomorrow when it is disarmed.
@dkemxr No, I didn’t. From the tutorial by Mackay that I was following it didn’t seem necessary to me. Do I need the ACRO_TURN_RATE beforehand? And if yes, should it have a specific value?
By the way, is STEERING mode necessary for tuning or is ACRO mode sufficient? The last bullet point on the Docs page for the steering mode makes me think it isn’t necessary?
Randy determines the ACRO_TURN_RATE for his rover by driving in manual mode with max throttle, max steering input and observing the resulting Gyro_Z or turn rate in Missionplanner. This is possible for slow rovers, but all of my rovers are to fast to do this. They will skid out of control or roll. I choose a reasonable acro_turn_rate for my rovers and tune steering to it. You can also limit throttle as you already did till the rover is slow enough to follow Randys procedure.
1 Like
Read the Wiki.The video is fine but you have missed a step that’s covered fully there.