The compass calibration was successful. Unfortunately, the telemetry is really weak, so when I arm the vehicle with the Graupner just a metre away from the GCS, MP doesn’t register the arming (even though I can drive the vehicle around), preventing cruise learning.
I will try arming in a closer range and see if that helps me somehow.
Check if the antennas are firmly screwed on and if the antennas have the matching connector type for the radios (sma/rp-sma/center hole/center pin). I also had telemetry radios shipped with 2.4GHz antennas, which of course do not work for 433MHz. Checking this requires to pull the cover from the antenna. It is sometimes glued on, though.
433MHz antennas should have a coil inside the cover, 2,4GHz antennas just have a piece of wire and a bell shaped metall piece around it most of the time.
It might be though that, since the laptop is refusing to connect itself to any WLAN, that this prevents a proper connection. We have our PC back, so I could try if that helps (though I can’t move it around as flexibly as the laptop).
I drove it “slow”, at somewhat less than top speed. I personally don’t understand either why it took such a slow value in, because I was expecting something between 0.5 m/s and 1 m/s for speed.
Both are 433 MHz antennas and radios, the connectors match, I have checked that. It has worked before as well, it’s just that the laptop and the vehicle are certified drama queens; was the vehicle a ship, I’d call it MS Regina George because it’s mean.
It was a wild guess that it could have something to do with WiFi. Sometimes the weirdest things have an influence on something, even though it shouldn’t be of any influence.
I tried the cruise learning again, but ArduPilot doesn’t take any new values for the parameters. I’m seriously considering to change the parameters CRUISE_SPEED and CRUISE_THROTTLE manually so that I finally have some good parameters to work with. The speed ArduPilot/MissionPlanner measured is way below the actual vehicle speed, and I have no idea why cruise learning is not shown in the HUD.
I tried downloading log files, but I just get errors.
Whether connected via telemetry or USB, I’m told that the log files cannot be downloaded when the vehicle is armed; the vehicle is disarmed, and it states so as well on the HUD.
When I’m connected with USB, the download window for the log files displays a normal error message and then just loads weird text and symbols while producing error noises non-stop.
I could try connecting the vehicle to the PC instead of my laptop to see if that helps; the laptop is not acting right, e.g. it’s refusing to connect to any WiFi network.
Unless I’m looking at this wrong you seem to have negative throttle for forward speed. Probably why cruise learning is failing. Not sure of all the history with this vehicle as to why that might be.
Yes, when I pull the right joystick down, I’m moving forward, and when I push the right joystick up, I’m moving backwards. Is there a way I can change this so cruise learning would work?
The way I do it with all of my rovers, is to make sure high PWM (1500us+) is forward/right, low PWM is reverse/left. This usually requires no inversed channels in my radio, no inversed rc input and no inversed servo output in ardurover. The output inversing is probably what you need to do. Check the Graupner, if stick up/stick right means high PWM output. Then check ardurover, if the inputs go up/right corresponding to the stick movement. Last check if the rovers wheels turn forward with stick up and vice versa. Same for the steering, stick right, steering right.
If any of the above does not apply, inverse the corresponding channel in the Graupner/ardurover RC input, ardurover servo output.
Okay, under SETUP, Basic Hardware, RC Calibration, throttle goes to 1100 when it’s moving forward, and to 1900 when it’s moving backwards.
So, right throttle down is forwards, and right throttle up is backwards – opposite of what it should be. It appears that the entire right joystick is reversed. How could I change that?
EDIT: I reversed it with Servo Output, that reversed the throttle to behave as desired.
I tried cruise learning anew with the throttle moving in the correct direction, but the values I get remain bad. CRUISE_SPEED is now at 0.08 m/s, and CRUISE_THROTTLE is at 18% … can I change the values manually? And if yes, which values would be recommended, for, let’s say, a speed of 0.5 m/s to 1 m/s?
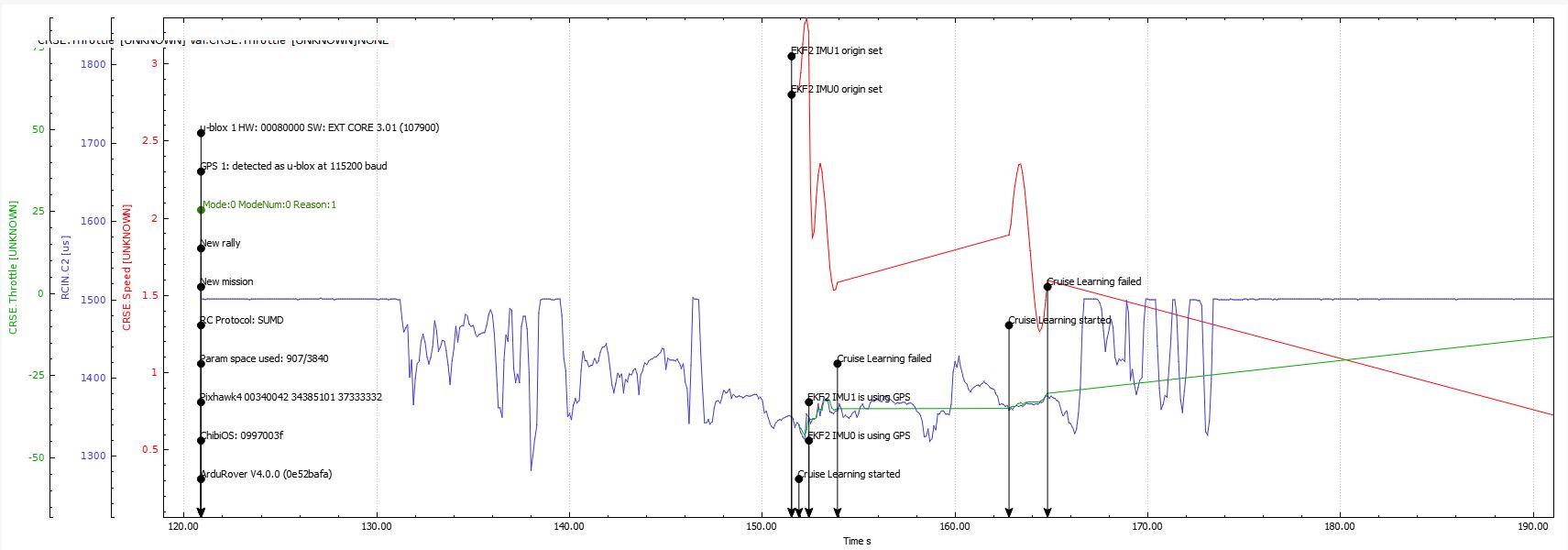
That is not how manually changing the values work. Before cruise learning was implemented, you could either use the telemetry graphs for throttle percentage and speed to find the values for cruise throttle and speed while driving the rover at a constant velocity or as an “offline” method, use the values from the dataflash log after driving the rover.
You could check a dataflash log from a recent drive to see if the rover ever recorded higher speeds. Or post the .bin log here, so we can have a look.
Those values are so low, they fall in the margin of error for GPS speed meassurement.