No, that’s not what we’re doing, sorry for not calrifying that earlier.
My professor already ordered a new ESC from Tamiya. Then you wrote that it isn’t suitable for use with a 3S LiPo, so after trying to find and not finding a proper 3S ESC that can be delivered fast, he decided to order a 2S LiPo for the new ESC as well.
The ESC arrived last week, and I replaced the old one with it.
The 2S LiPo arrived today, and it was charged, so I could do some tests.
I tried doing the cruise learning today (with QGC because MP once again showed me nothing on screen), and here is the new parameter file. I think changes have been made to CRUISE_LEARNING and *_THROTTLE. ArduPilot-QGC-28092020-1521.param (24.9 KB)
If these values are any good, I would continue with ACRO and STEERING modes next.
It learned that 73% throttle is 0.07 m/s which is likely not good. That’s crawling pace at relatively high throttle. I would fix the problem with Mission Planner and use it exclusively until you have the vehicle tuned. It makes a fine Ground Station but for tuning Ardupilot you really want to use Mission Planner that natively supports it.
My problem with MissionPlanner is that there is no indicator that cruise learning started when I switch SW3 and there is also no indication that it took any values at all. It should be on screen, but when I attempt cruise learning, there is nothing, and when I check the parameters, there are no changes.
If it wasn’t for this problem I would definitely be using MP instead of QGC for the learning and tuning processes.
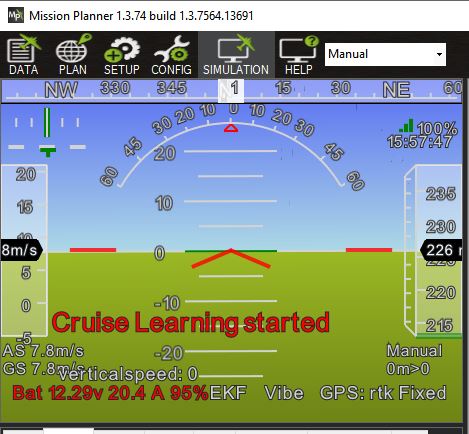
If it’s configured properly you should see this when enabled:
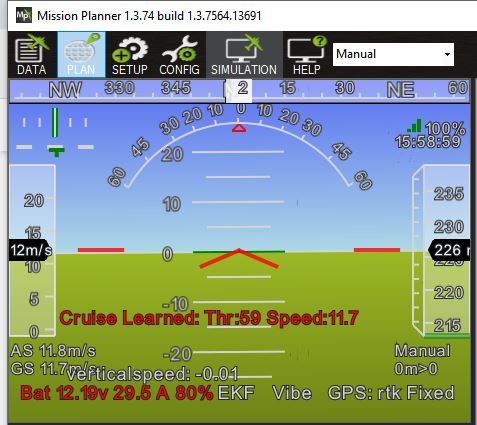
And then this when it’s learned:
If you have speech enabled in Mission Planner it will announce when Learn has started, when it’s Learned and say what the values are if you can’t see the screen. Are you getting telemetry data on the HUD at all?
I don’t see that on the screen when I try cruise learning.
I would post a screenshot but the windows laptop is having a wonky internet connection rn and it’s past 10:30 PM here already so I’m not willing to wait for it to establish a proper connection. But I will upload an image tomorrow.
From the Status screen in Mission Planner does the chanell you have configured for Cruise Learning go high (>1800) when you flip the assigned switch? MP does have some good troubleshooting tools at hand.
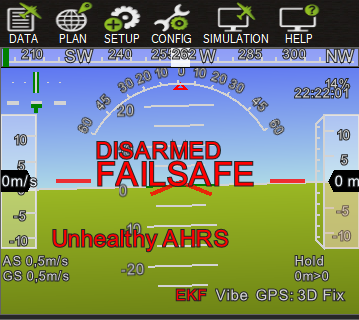
Okay, so here is the screenshot I wanted to add yesterday night:
I can check if the channel reacts in MP. It should work however since QGC shows a clear reaction when I switch SW3.
Yes, channel 6 goes to 1900 when I activate SW3.
OK, Chan 6. Do you have RC6_OPTION set to 50 (LearnCruise)? The last parameter file you posted indicates that you did set this. When you are driving in manual this function should work.
That Failsafe could be from a position estimate error. Let it sit for awhile and it might just go away.
Yes, RC6_OPTION is set to LearnCruise. Weirdly enough, while it didn’t show cruise learning yesterday, it showed it today on the HUD (maybe it’s because I changed the language from German to English?). So I will try the cruise learning again and see if I get some good values now.
The failsafe is there constantly, whether I’m inside or outside. The transmitter also asks me if I have a failsafe yet. I think there are just too many interferences to estimate the position correctly.
I’m using the Pixhawk 4 GPS module from Holybro (this one here) and I put it at the very front of the vehicle, as far away from other components as possible, as you can see here.
I think the interferences are mainly caused by the position though since I’m living in a settlement and not in an area undisturbed by various WLAN signals and electronics. When I’m outside the GPS estimate is rather close though. It’s just indoors that it thinks its somewhere in the middle of the Sahara and not in Germany.
That’s a good location for it. If you notice in the screen shot you posted the EKF indicator is red. You can click on that and it will highlight what it doesn’t like. Chances are it will the Horizontal position or velocity. But outdoors this should go away. Perhaps do another compass calibration (outdoors) if you moved some things around or replaced them like the battery. Any hardware change requires a new compass calibration.
Thank you! Yes, I will check that. Oh, I didn’t know that I had to recalibrate the compass after hardware changes. Last time, I used compass 0 for calibration because compass 1 and 2 either took very long and then failed or failed right off the bat. I will do it again and let you know about any progress.
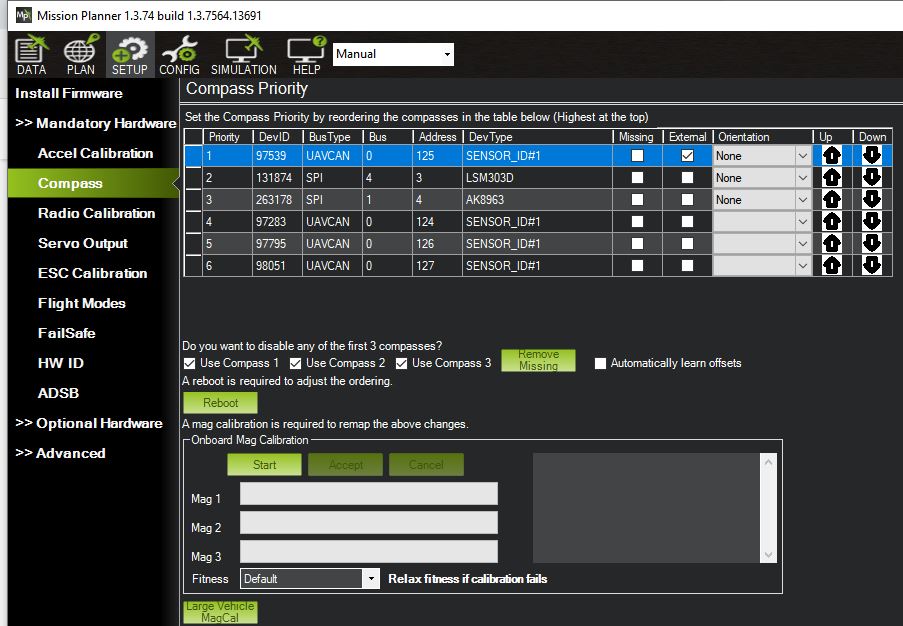
After you do the calibration post another parameter file from Mission Planner. The one from QGC shows odd device ID’s for the compass’s and only 2 are shown. Could be a QGC thing, not sure.
Okay, I will. I’m going to read myself into the calibration with MP first though, I opened the Compass and Motor Calibration panel and when I click “start calibration”, it doesn’t do anything when the vehicle is disarmed and standing (in QGC it worked immediately) so I want to make sure I will get it right.
… turns out I was in the wrong compass calibration section
According to the documentation, that’s the right one. I was in the calibration section under Optional Hardware, so no wonder it didn’t work right. I’m reading the documentation right now and I will watch the videos so I can get it right either today or tomorrow, depending on the weather (it’s raining slightly rn and I don’t want my hardware to get wet, that would be counterproductive + sundown is in just a little over an hour).
Ah right. That’s the Compass Motor Compensation screen. You don’t have to worry about that with a Rover. If your Compass Cal screen doesn’t look like the above update Mission Planner.