No I think it’s great but I am learning and the weeds are mainly located in between my ears.
Ask any questions you have. I want to improve the software for you, the users
Its pointless to configure the notch filter with output oscillation as bad as yours.
Are you able to get ESC telemetry?
The current ESC’s aren’t capable of tele. I do plan on upgrading them in the near future when funds allow. There seems to be a mystique around ESC’s (which ones are the best in relation to the size of the quad, props, motors, budget, 4in1 vs. single and preference), If you have some suggestions I’d love to hear them. I have read good things about these 2 below. I tossed the 4 in 1 idea around because of the low amp draw that I need for this build but with limited info around people using 4in1’s for larger quad builds I have rethought it.
Or
@dkemxr Do you have suggestions as to where I should start? I’m sure that you have probably covered this subject many times. I will start the search process.
You can start solving the output oscillation problem by using the configurator software
Ok I will head back into that program.
So that software program essentially even though d shot is checked I just need to uncheck it since my ESCs aren’t dshot capable and just move through it like that is that kind of how it’s working? It’s recognizing my flight controller as a Maytak Even though it’s an orange plus is this normal I just want to confirm before I move forward so I’m not messing anything up on my end and make it more complicated?
Never mind I found the user manual I’ll start reading through it
Welp I worked my way through the configuration tool and it crash. Here is the bin file. I took off nicely then shot up in the air, I was able to decrease the throttle but it was like it didn’t care what the stick inputs i gave it. I am sure you can see all the detail in the bin file though.
Oh? There is nothing to see in that log with the log bitmask you have set.
And it doesn’t look like it was flying at all. At least view the log for yourself before posting it to determine if its of any value.
I am not sure why it didn’t log anything
I told you why. Because you have this.
LOG_BITMASK,524416
Now you should look at your parameter file and see for yourself what is being logged with this bitmask (hint, not much) and you will learn something.
I did review it and didn’t see much but thought that maybe I was missing something. Dave I appreciate you looking into this but I am not looking for a hand out and I am trying my best to figure all this out. I have been following the paths that I have found and its not working out as of yet.
Post a .zip file containing all the files in ArduPilot Methodic Configurator vehicle configuration directory that you created.
My guess is that you did take off prematurely without doing the required steps. But I can only see what happened once you post that zip file.
In the user manual for the configurator it shows red #3 for the flight controller option. I have downloaded the latest version and I missing something? When it shows the “current value” is that what is currently on the flight controller or just generic?

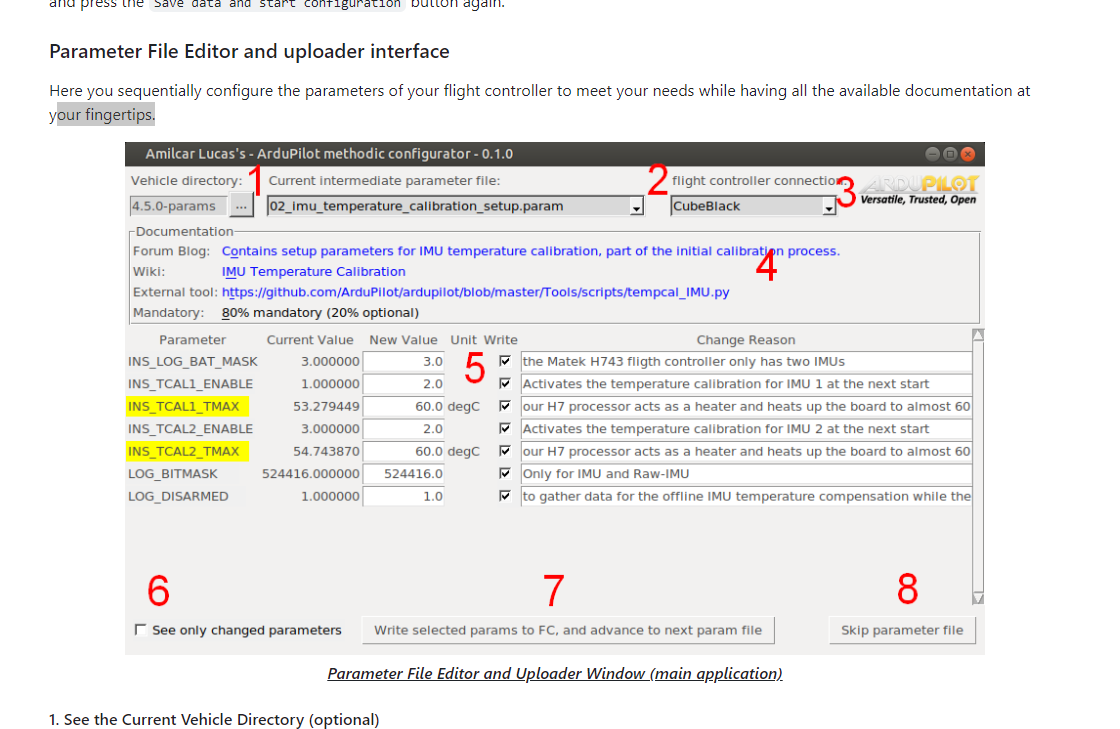
No, that picture is outdated there is no more #3.
Yes that is the current value in the flight controller as explained in the mouse over help text.
Thanks for all your help.
I am backing up and going thru all the basics currently, plus I believe that one of my issues with this build may be out of date ESC’s. I am digging thru the forums to see if I want to go with 4in1 or single for this 1000+mm slow flyer.
No matter what you choose, at the moment you don’t want to buy BLHeli32 ESCs ![]()
As per Dave’s steering I picked up BLHeli32 esc’s, he said it won’t be an issue. They will still communicate with the cube orange flight controller correct?