TFmini now upgraded to new version with IP65 protection. More details below:
"In order to meet the user’s requirement in harsh conditions, we newly added IP65 level waterproof shell to TFmini!
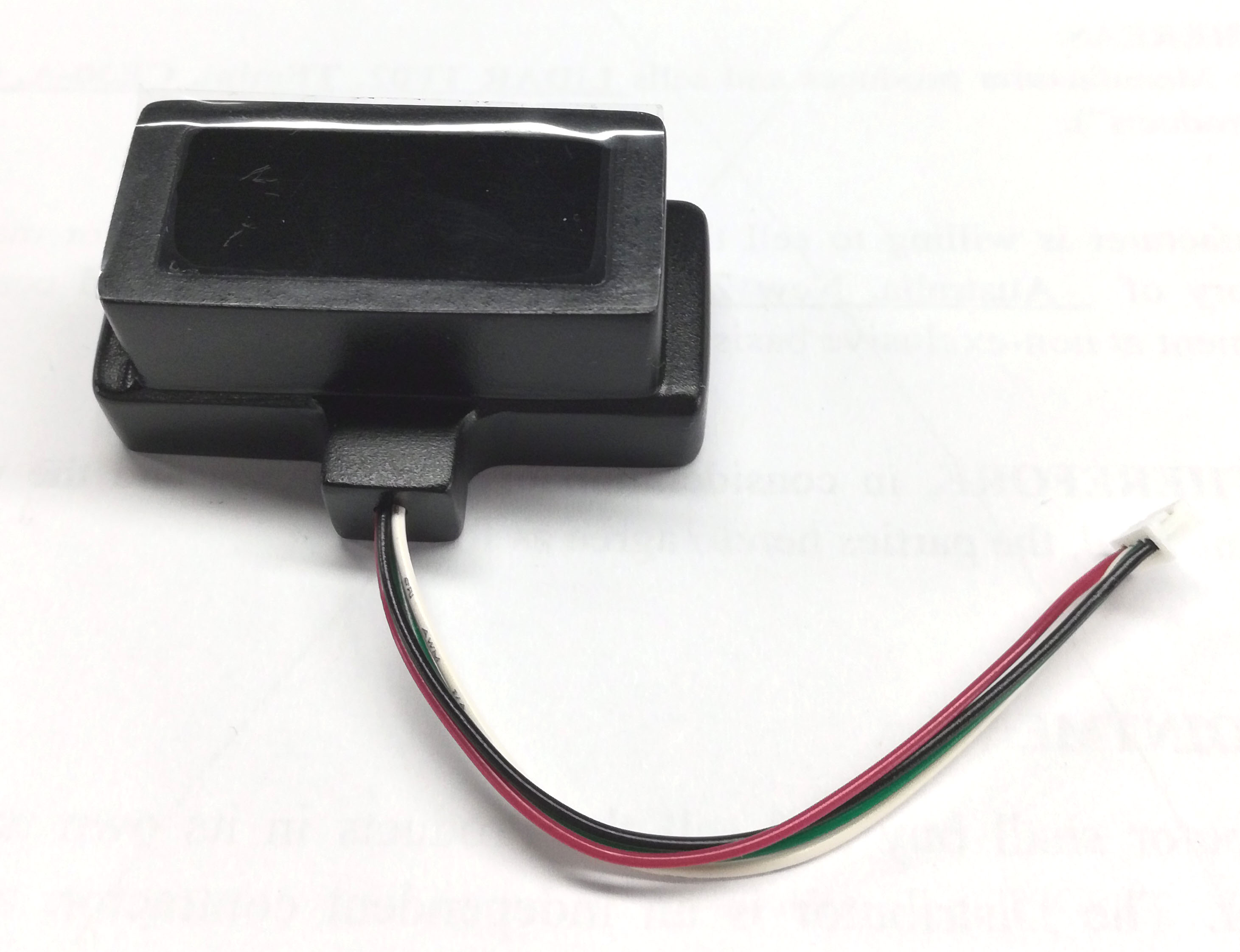
In addition, the switching value function is also added. First, let’s take a look at the changes in appearance.

Left one is the update, is it cool? : )
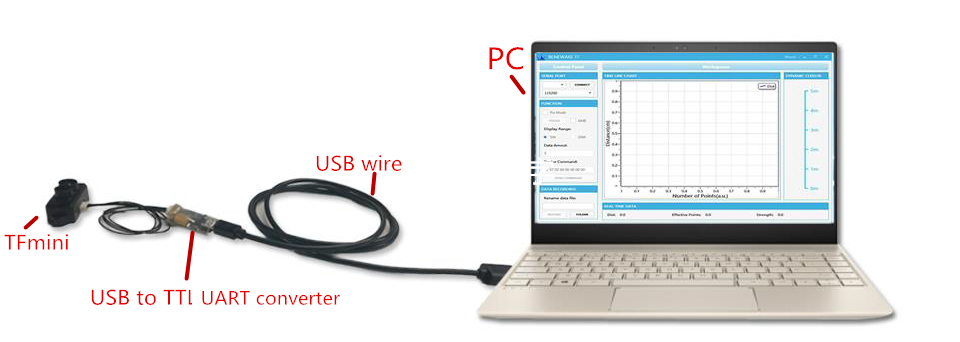
Those who don’t know TFmini before can get familiar with product through the following introduction.
TFmini Product Introduction
TFmini is a milestone for Benewake to promote the process of low cost LiDAR.
With its unique optical, structural, and electronic designs, the product possesses 3 major advantages: low cost, tiny volume and low power consumption. The built-in algorithm adapted to indoor and outdoor environments can guarantee an excellent ranging performance at a low cost and in a tiny volume, which highly expands the application fields and scenarios of LiDAR and lays a solid foundation for future “eyes” in the smart era.
For more information, please visit our website at http://www.benewake.com/tfmini.html
The highlights of TFmini updating
Protective shell
Switching value
Protective shell
In order to meet TFmini’s requirement in some harsh environments, we have launched protective accessory that allow the TFmini to meet IP65 protection level, while only increasing a little volume.
Switching value
We update the firmware so that TFmini can output switching value. Current functions are:
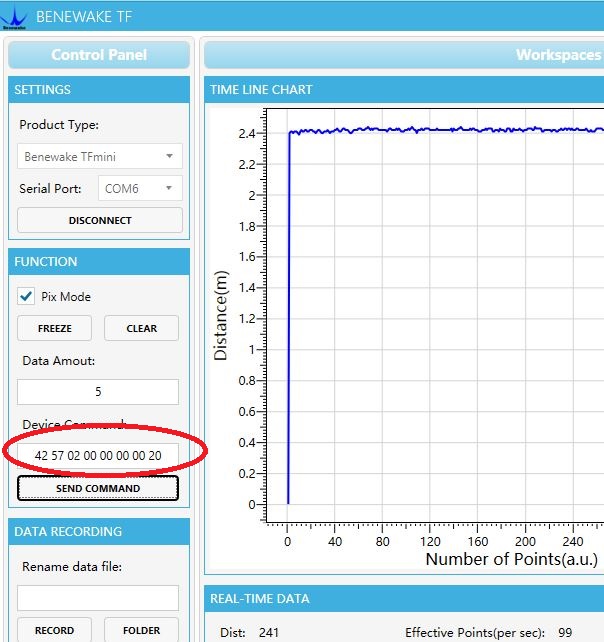
① The standard UART communication can be switched to the I/O push-pull output via a serial command, and it can also be switched back through the command to achieve one-touch switching.
② The distance threshold value of switching can be changed via the serial command to increase the flexibility of uses;
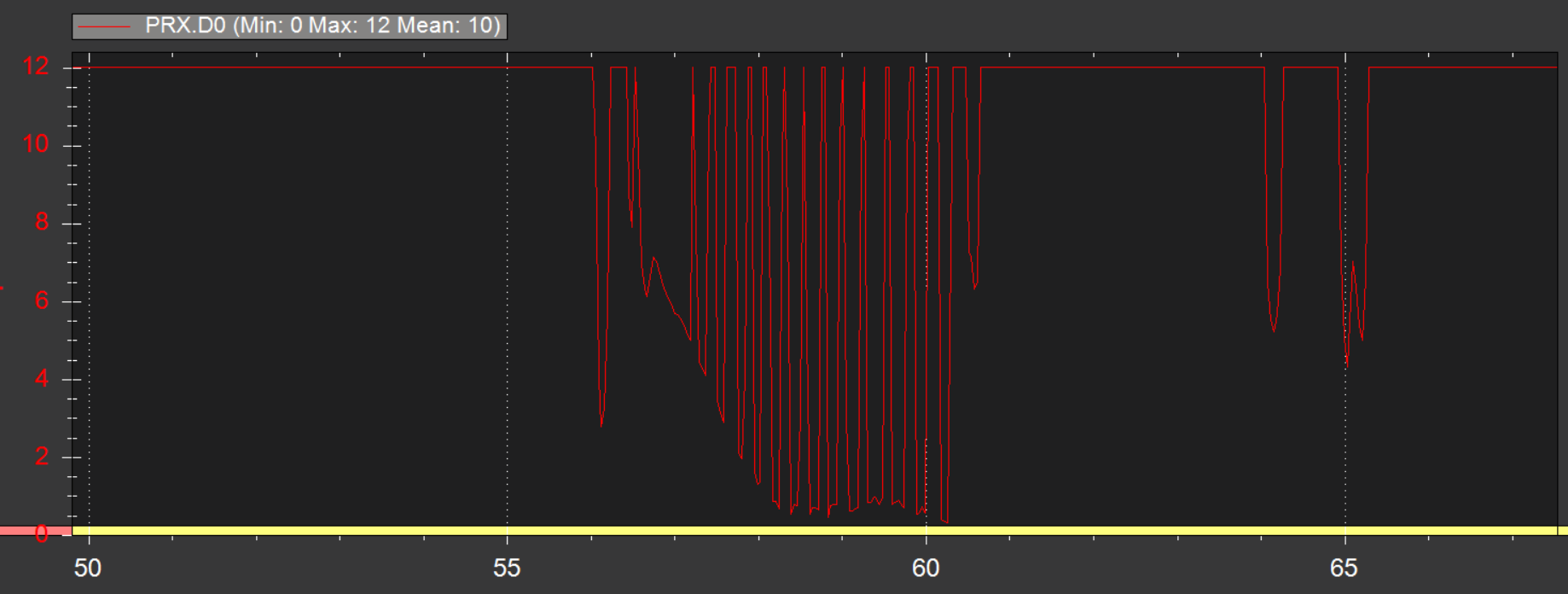
③ Default output states: if there are obstacles (range value within the certain distance), TFmini output high level of 3.3V; if no obstacle or out of range (ranging distance outside the certain distance), TFmini output low level of 0V. The the output level can be changed according to requirements.
Coming soon: Wide power supply voltage of 5-28V; upgrade type TFmini which meets IP65 protection level without customized protective shell; output switching value signal without firmware update requirement and switching value output high level up to 24V. "