@nicodh ok I did some test and I confirm the “0” distance when reading over 6 Meter outdoor.
An easy work around can be implemented using the Arduino , we output 7 Meter when the distance and the signal strength is below a certain level.
I uploaded an example on my github
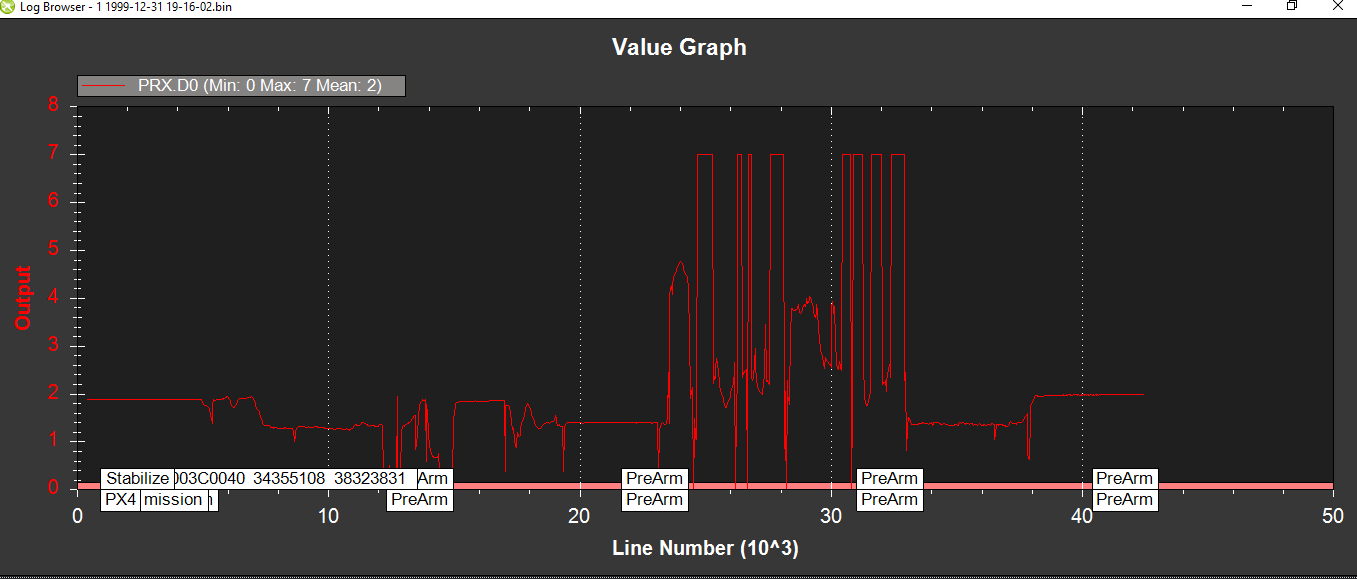
The outputs reads like this ( I can be adjusted with : strLimit = 10; distLow = 46; )