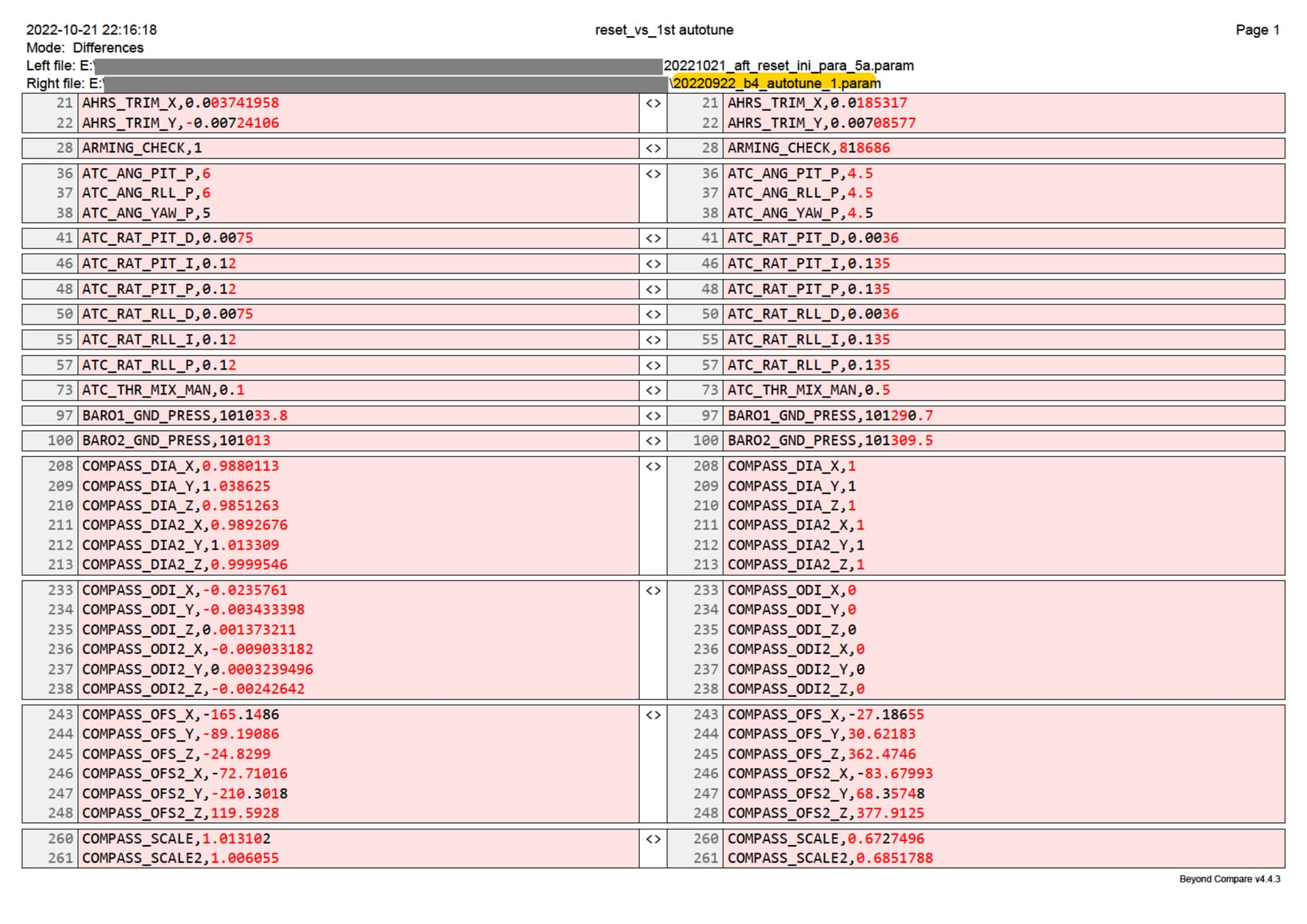
I do not actually look forward to a good surprise and the autotune will complete as the suggested method I had tried before in Sep 2022. The only differences are the PSC_xxx values and PIDs differ from the default initial parameters.
Anyway, I will still try the 4th time once I have successfully booked the space next week. If it works, then the default initial parameters do not work well for this drone’s autotune.
Autotune seems to give a conservative ATC_ACCEL_Y_MAX which can lead to an apparent “overshoot” in yaw movements. Doubling or at least increasing ATC_ACCEL_Y_MAX allows yaw to respond to input and corrections in a more timely manner.
Its not critical at all, but can be useful or nice to have yaw responding in a timely manner.
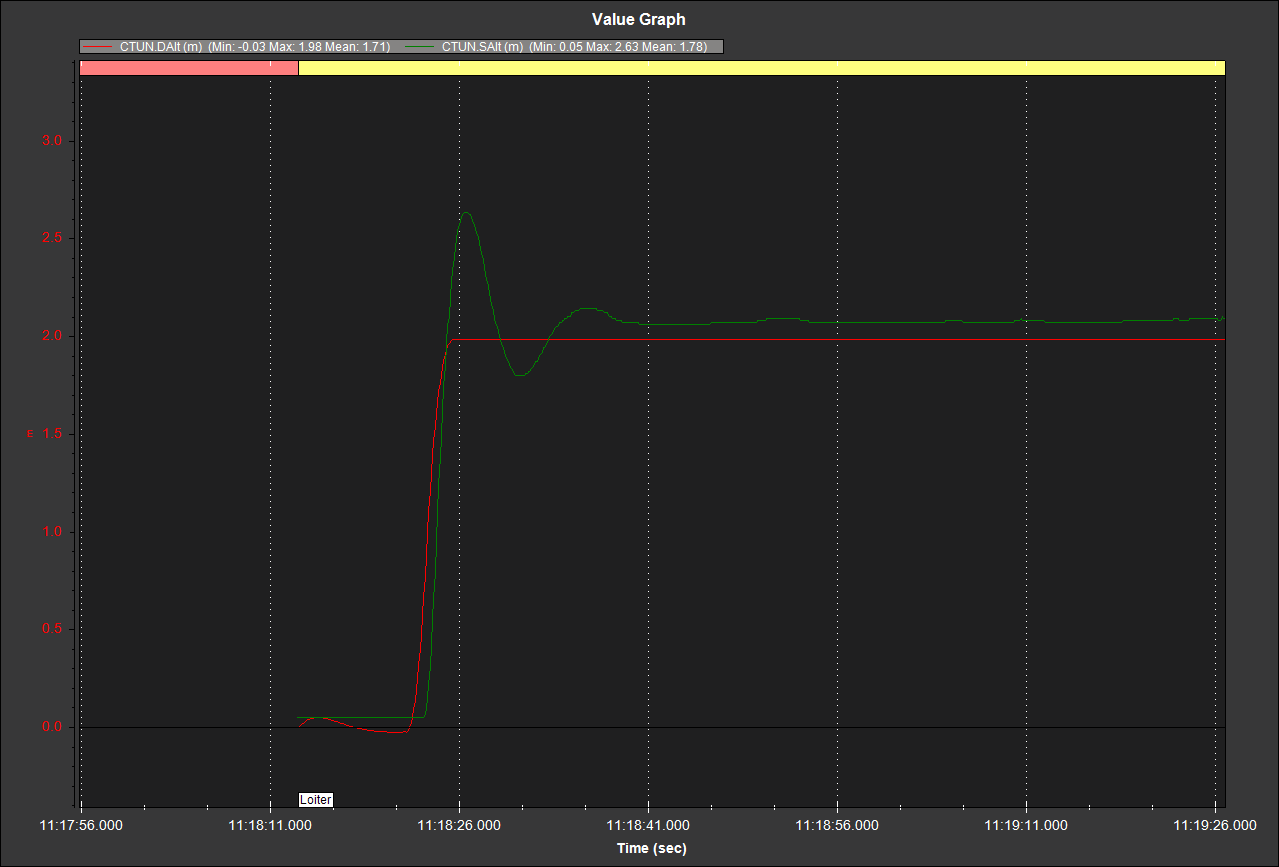
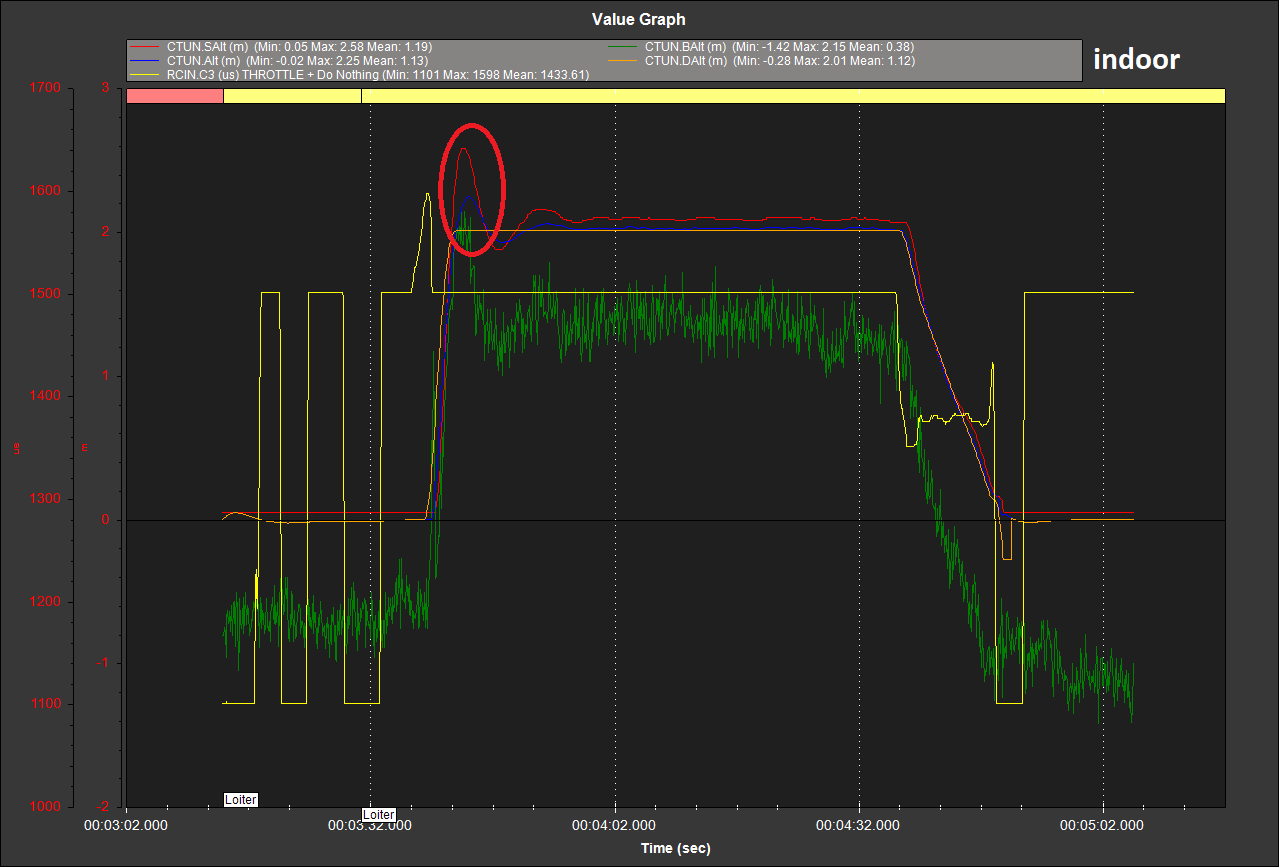
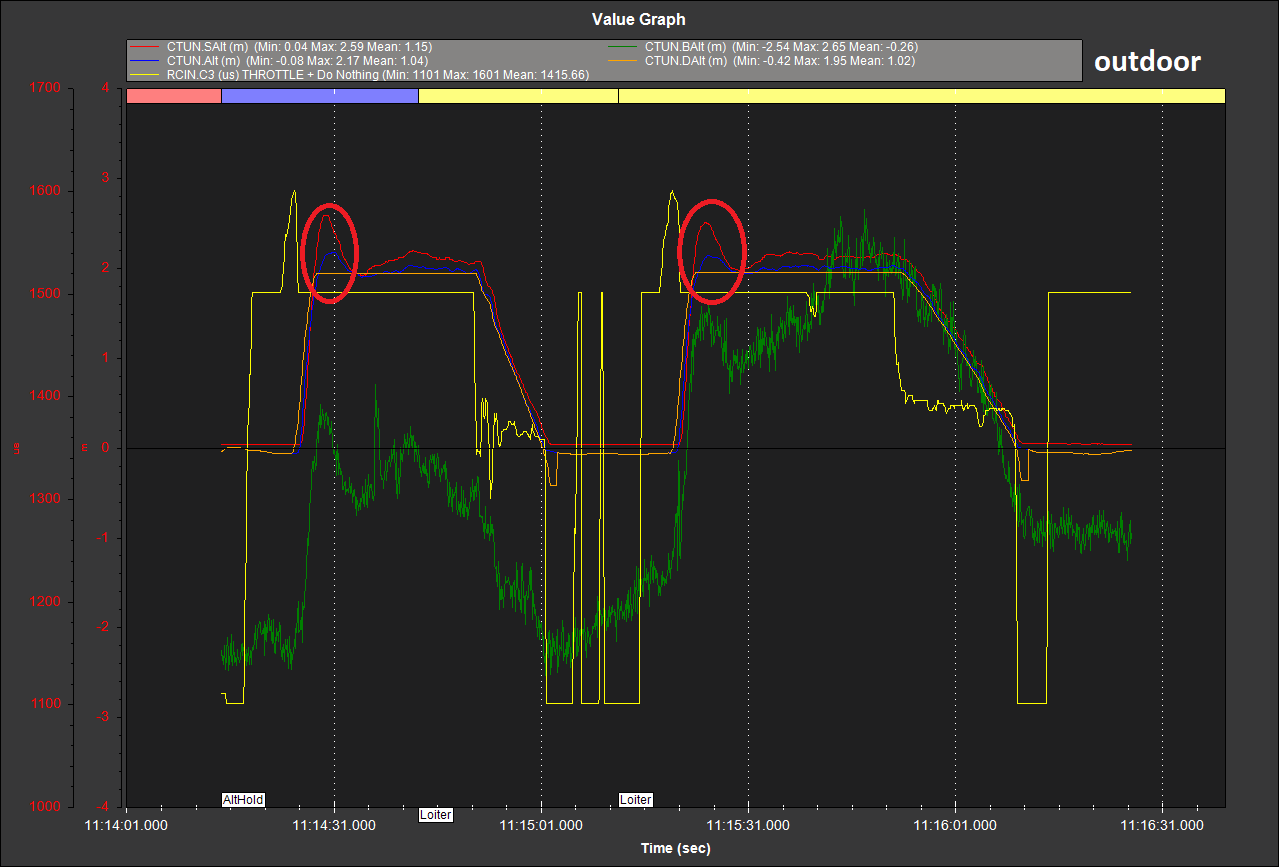
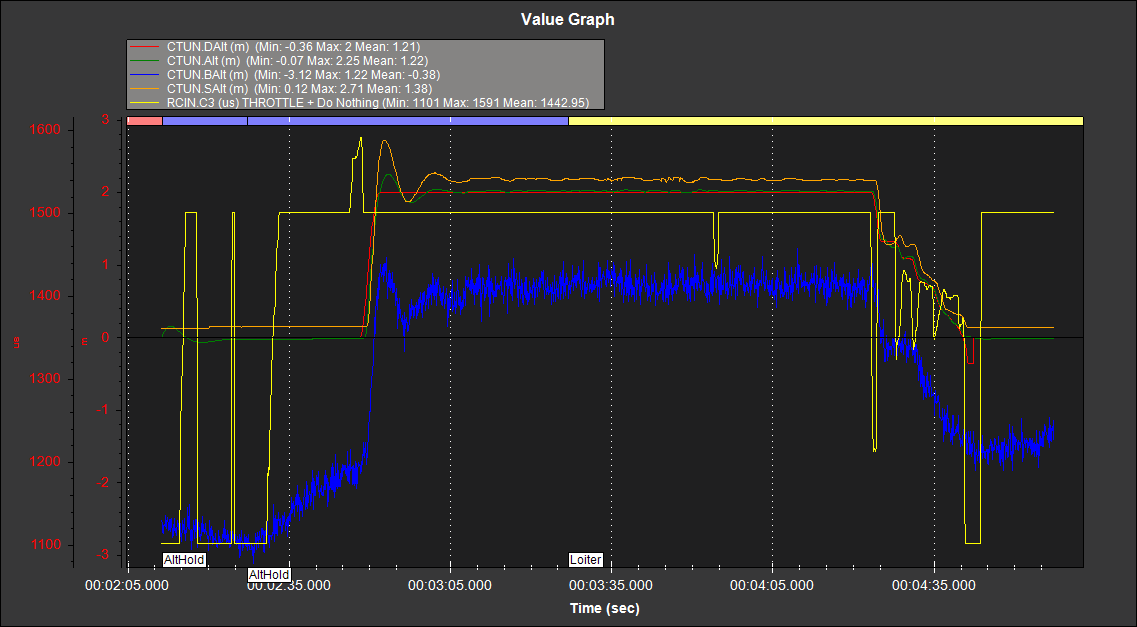
after resetting and using your suggested default values for autotune, I keep getting Altitude overshoot when the pilot takeoff, Pilot_TKoff_ALT = 200. After a few seconds, it will settle down to ± 2m.
Is it caused by one of the PSC values? Can I change back to default values?
this drone has been overall functioning well since 2022 July. Just last week, I did a very successful 25mins single battery flight indoor. Really does not understand where goes wrong.
It’s like a problem with an ESC, maybe even a motor but you already replaced it.
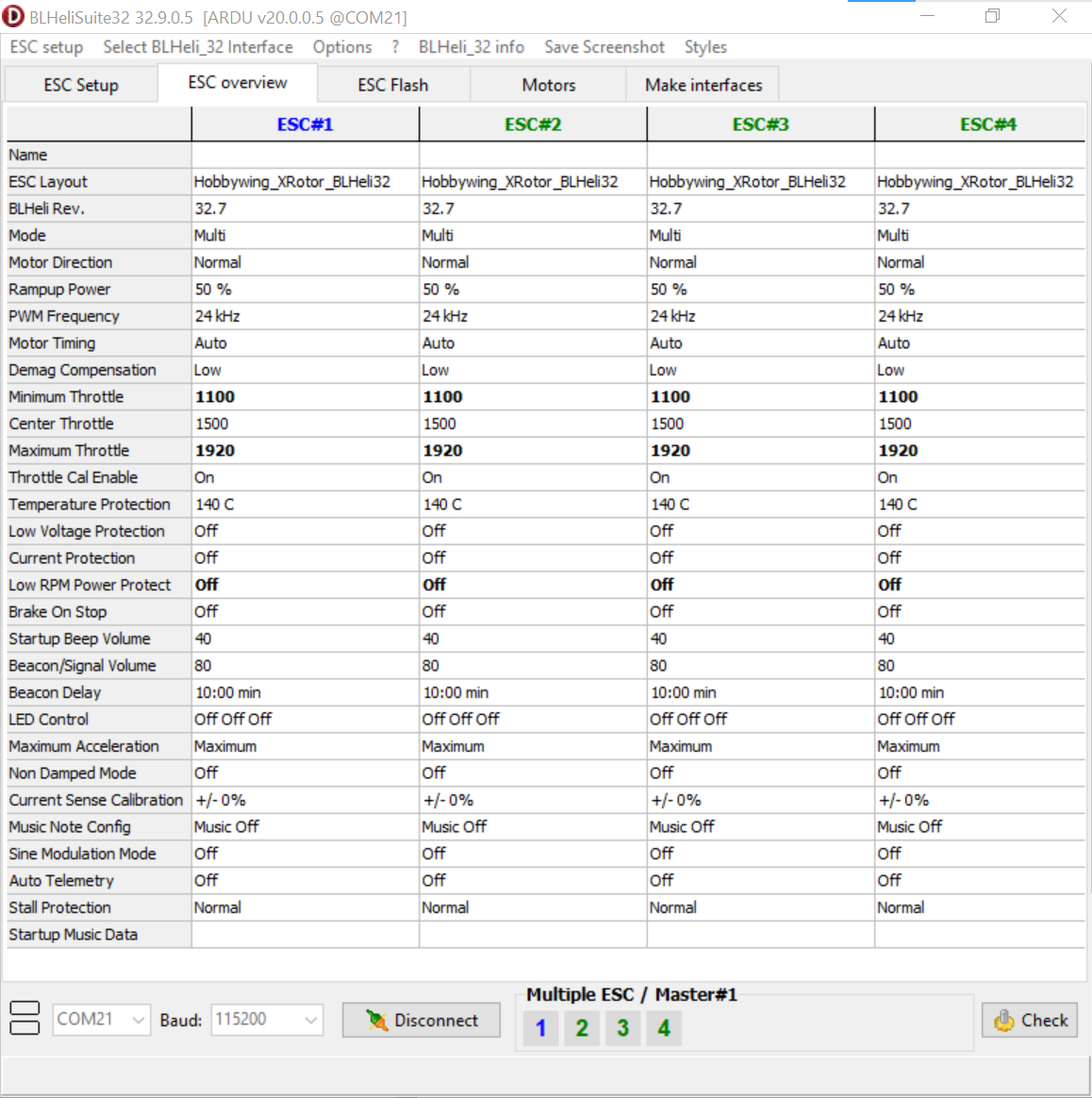
You ESC settings look good in that pic.
You still have some frame twist or something going on there, motor outputs between 1,2 and 3,4 are different.
Are the motors or ESCs getting hot?
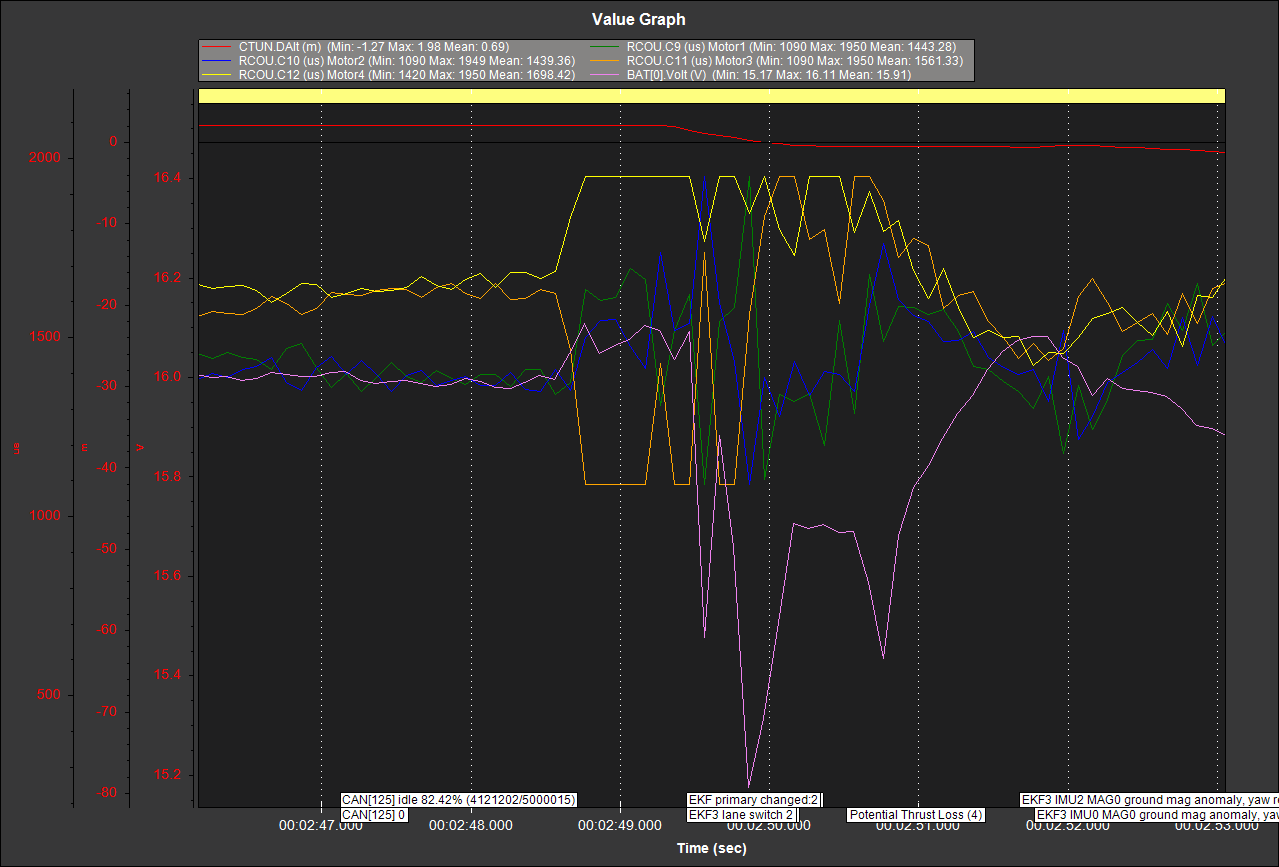
I am in preparation to upload the only timelapse video [done], the video indicates motor 4 started the entire problem. It falls back first and hit the ground. after that, it continues to climb to the ceiling and I am worried I will spoil the rental court so with no option but to kill it. Everything just happen too fast for me to think too. 102 01-01-1980 08-00-00_b4_crash.bin was a flight just before this video record and everything was as normal.
Do you suspect the old firmware issue?
No, not at all, after 25mins flight time, a hand can touch, estimated 40-55 degrees or lower. a very cold motor. ESC I am not so sure but is rated 60A (15A per arm), I do not think is an issue. The hover current for the entire drone is like 8-10A.
we will take note, we will settle it in our 2nd frame setup.
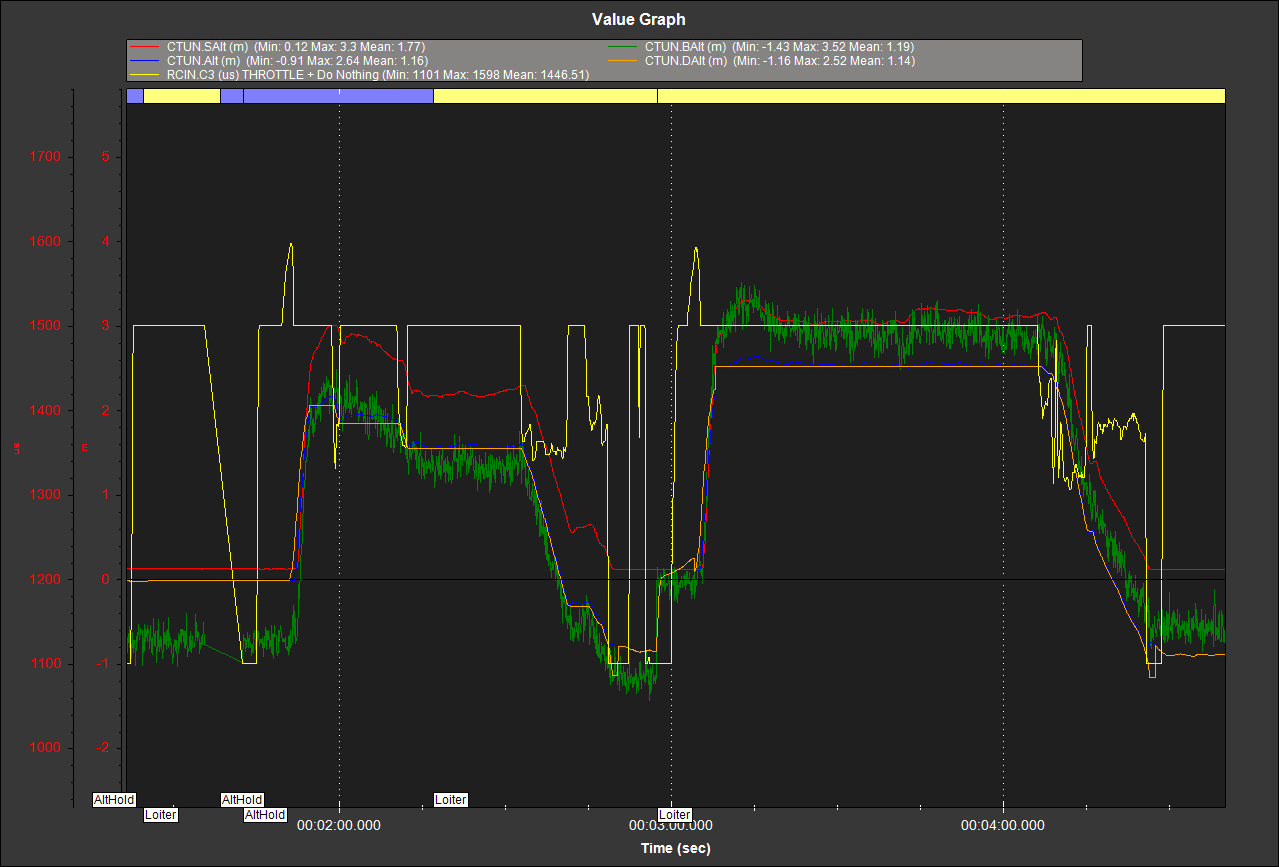
moved to 4.3.0, what can this value BARO_FIELD_ELV help in the overshoot during takeoff? I still see it in 4.3.0 with the BARO_FIELD_ELV default value.
This parameter is not persistent and will be reset to 0 every time the vehicle is rebooted
Just the 4.3.0 stable release. I am outside, later I will put up the attitude graph, which is the same. Do you think the sampling rate of the rangefinder and pilot acceleration can also affect the overshoot?
4.2.3, I got the repeat Potential thrust loss, I hope such an issue did not propagate to version 4.3.x. Fortunately, with MOT_THST_EXPO,0.99, it did not crash or hard landing, 4.2.3 corrected itself and climbed back.