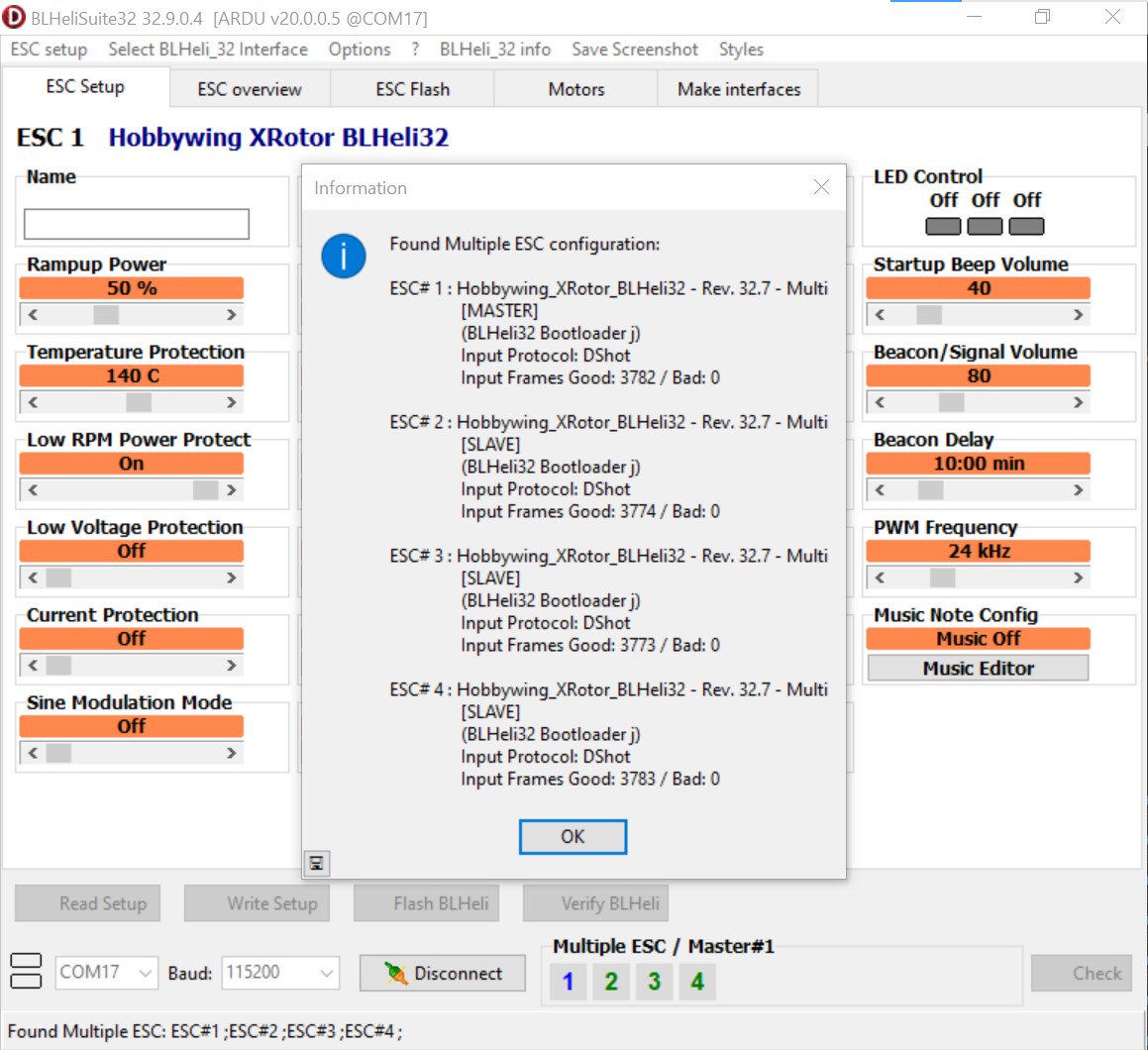
In BLHELI32 settings have you disabled Low RPM Power Protect ?
Normal thrust expo should be OK, as calculated by the Initial Parameters. You can adjust it later as per:
- set too high you can see instability at low throttle
- set too low you can see instability at high throttle
Set
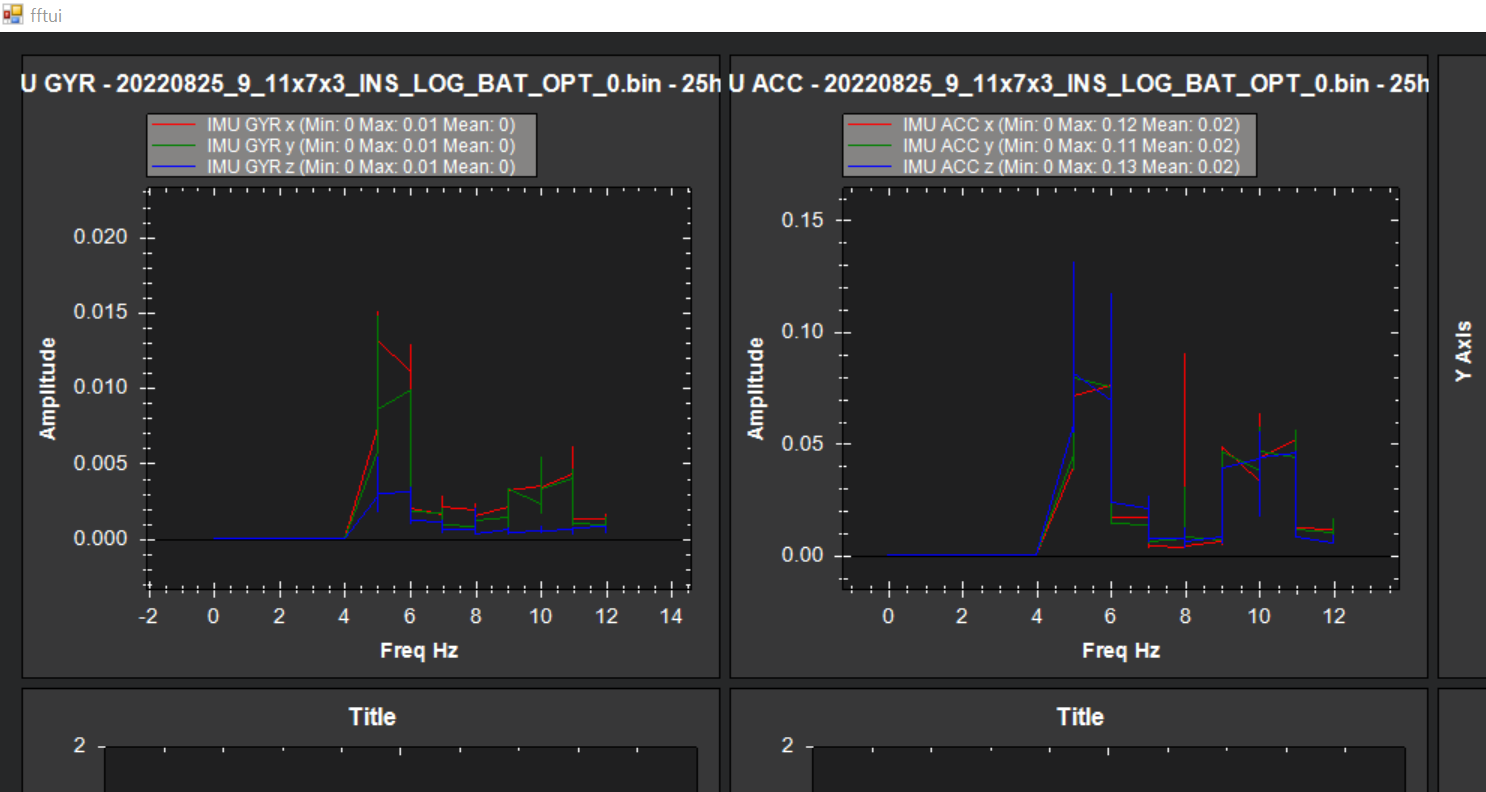
INS_LOG_BAT_MASK,7
to gather data for setting up the Harmonic Notch Filter.
Best if you can get the ESC Telemetry wire to a serial port RX pin and set (serial or telem 2 used in this example)
SERIAL2_BAUD,115200
SERIAL2_OPTIONS,16
SERIAL2_PROTOCOL,16
You will then have RPM, voltage and temperature data
And the Harmonic Notch Filter can be pre-set to use that ESC data
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
INS_HNTCH_FREQ,80
INS_HNTCH_BW,40
INS_HNTCH_ATT,40
Also check out the Master Airscrew MR series props, I can vouch for the 12inch for exceeding expectations in flight time and lifting ability. Only 2 blades too, so usually considered more efficient in this application.
EDIT
additional things:
Check your Arming Checks, usually a value of 1 is OK
There was no GPS data in the log I looked at, even though it’s configured
Set
BRD_BOOT_DELAY,5000
to allow the CAN GPS unit time to boot up before the flight controller
and
FENCE_ENABLE,1
you wont be able to arm in any mode until there’s valid GPS data and Home can be set
This will take time but you get used to it, but safety is important and it helps prevent fly-aways
Also configure Loiter as a flight mode, if you are after flight time and efficiency this will be your main selection once tuning is done. Keep Stabilise and AltHold handy.
Later you’ll be able to check in logs for the most efficient speed and set that as your Loiter speed, WPNAV speed ( * and RTL speed)
You can easily swap in Autotune instead of Loiter in the flight mode list for the purposes of tuning.