Hi @tridge Thanks for sharing your Striver parameters. I would be updating to 4.1.5 today and this would help considering that the default MFE parameters are out of date with the 4.1.x.
1 Like
Hi Tridge,
Thanks for your updates on the Striver which I too am about to complete. I also got a Freeman 2300 tilt VTOL and loaded the MFE parameters. Have you flown your Freeman 2100 and done any updates on the MFE params so it will be compatible with the latest Arduplane stable firmware?
yes, I did an update in the Freeman2100 thread:
@tridge @Michael_Oborne Hi there! I had a strange behavior on a Striver flight today. I am not sure what caused the Striver to skip VTOL takeoff (WP1) and head from the ground straight to WP2, which is 1.4km away @ 360m AGL. I have no idea why it skipped the VTOL takeoff altitude and attempt to ramp up to WP2. It was pure luck not hitting the roof and poles.The test mission proceeded for about 45 minutes and landed later without incident. After landing, i used the simulator to check and found that the mission planner was activating WP2 instead of VTOL takeoff WP1, each time AUTO is clicked. The only change I have had is upgrading mission planner. So, I re-installed Mission planner 1.3.76 and this behavior got resolved. Is there a way to force a minimum safety altitude and prevent ramps towards a waypoint from ground?
Plane: 4.1.5
Video: MFE Striver VTOL_Arduplane_4.1.5_Mission-Planner_1.3.76 near crash - YouTube
Telemetry log: Microsoft OneDrive - Access files anywhere. Create docs with free Office Online.
DataFlash Log: Microsoft OneDrive - Access files anywhere. Create docs with free Office Online.
Thanks for the help.
Sunday.
what happened was this (in sequence)
- the GCS uploaded a mission with a zero VTOL_TAKEOFF altitude:
2022-01-25 01:04:35.86: MISSION_ITEM_INT {target_system : 1, target_component : 1, seq : 1, frame : 3, command : 84, current : 0, autocontinue : 1, param1 : 0.0, param2 : 0.0, param3 : 0.0, param4 : 0.0, x : 47374063, y : 70295143, z : 0.0, mission_type : 0} - the plane was switched to AUTO and the first mission item was loaded and the wait for completion code was started. It didn’t complete the first item as the plane was disarmed
- the GCS then uploaded a replacement for the takeoff waypoint that had an 80m target altitude
2022-01-25 01:10:57.60: MISSION_ITEM_INT {target_system : 1, target_component : 1, seq : 1, frame : 3, command : 84, current : 0, autocontinue : 1, param1 : 0.0, param2 : 0.0, param3 : 0.0, param4 : 0.0, x : 47374063, y : 70295143, z : 80.0, mission_type : 0} - the replacement was in mission memory, but did not replace the existing WP at zero alt that it was already working on. We don’t replace WPs that are still being processed when you upload a mission
- the place was armed, and the zero alt target WP immediately completed, so it moved to WP 2
we could avoid this by re-reading the mission when you arm. I’ve noted that for discussion
1 Like
Thank you so much @tridge for the quick response. This is very clear to me now. In the meantime, I will simply avoid uploading missions on the ground while in AUTO mode. Once again, I appreciate your feedback. Thanks.
Hola Rollys, pudiste armar tu VtBird?
No, not yet. Too many things going on at the moment. Hopefully in a few months when things settle down, I’ll start on it.
Google translate:
No aún no. Demasiadas cosas pasando en este momento. Con suerte, en unos meses, cuando las cosas se calmen, empezaré con ello.
Me encuentro armando un Vtbird 4+1, quería saber si me podrías indicar cómo realizar el cableado a una controladora Cuav v5 nano?
Just follow the wiring diagram the way Finwing Hobby has it specified. You can download their Ardupilot parameters here.
Good luck.
Google translator:
Simplemente siga el diagrama de cableado de la forma en que Finwing Hobby lo ha especificado. Puede descargar sus parámetros de Ardupilot aquí.
Buena suerte.
Hello Greg. Did you manage to find out the flight time of your fighter with 6S 21Ah lipo?
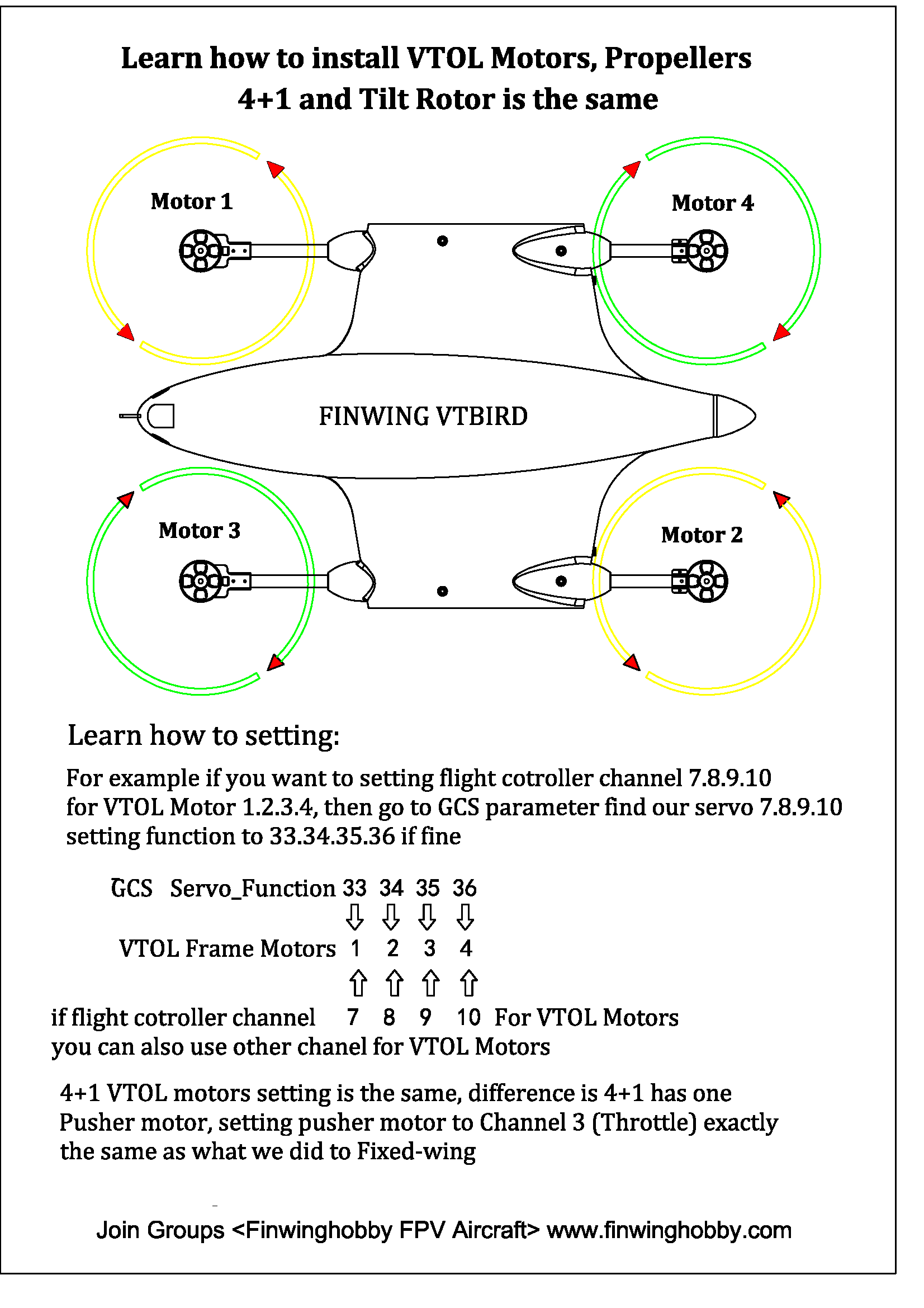
No se encuntra especificado por Finwing Hobby el cableado. Necesito saber que puerto utiliza cada motor y cada servo y mi controladora.
Esta era la página 3 de su manual. Espero eso ayude.
Buena suerte.
This was page 3 of their manual. Hope it helps.
Good luck.
Hi, I have to buy this kit (Pixsurvey Cube V3 Aerial Survey Autopilot Kit VTOL Autopilot Kit|Toy Sports| - AliExpress) but I don’t find anything on web without Ali express that ship from China, anyone know if there is some shop in Europe(i’m come from italy) for this things? Thanks to everyone
Me fue de ayuda! Muchas gracias.
Me podría ayudar con otra duda? Necesito saber si los alerones se pueden conectar ambos a la misma salida de la controladora?
HI thanks for the informative discussion on this forum. I have been flying a Believer using a pixhawk 2.1 and cube Black with a Here 2 GPS. I am looking to switch over to a VTOL system and am currently looking into the MFE Striver as I can use the 6S system from the Believer. Will the Pixhawk Cube Black be suitable for this? Any assistance with this would be greatly appreciated. Thanks
1 Like
Hi…It should work. I don’t see any reason why it shouldn’t. The black’s F4 processor has tons of power to run a VTOL model.
@sidajili Thanks for your response. Good to know that the cube black is such a capable machine.
I thought others might like to see my airspeed install for Striver Mini:

key features:
- a bit further along wing than others, so doesn’t interfere with arm folding
- recessed into foam instead of through foam, so it can be further out from the leading edge for less positional error from accelerated air on static port
- tubes are run along channels cut in the foam, then whole thing held with tape
- using CAN sensor (new Hitec DLVR airspeed sensor in this case)
3 Likes

The MFE team released a FMU v3 flight controller, you can learn more through the link below.
https://discuss.ardupilot.org/t/a-pixsurvey-v3-flight-controller-is-recommended-developed-based-on-fmu-v3-which-is-more-suitable-for-vtol-aerial-survey/83700