Congrats on finishing your build! We’re going into winter here so my inspiration is lacking.
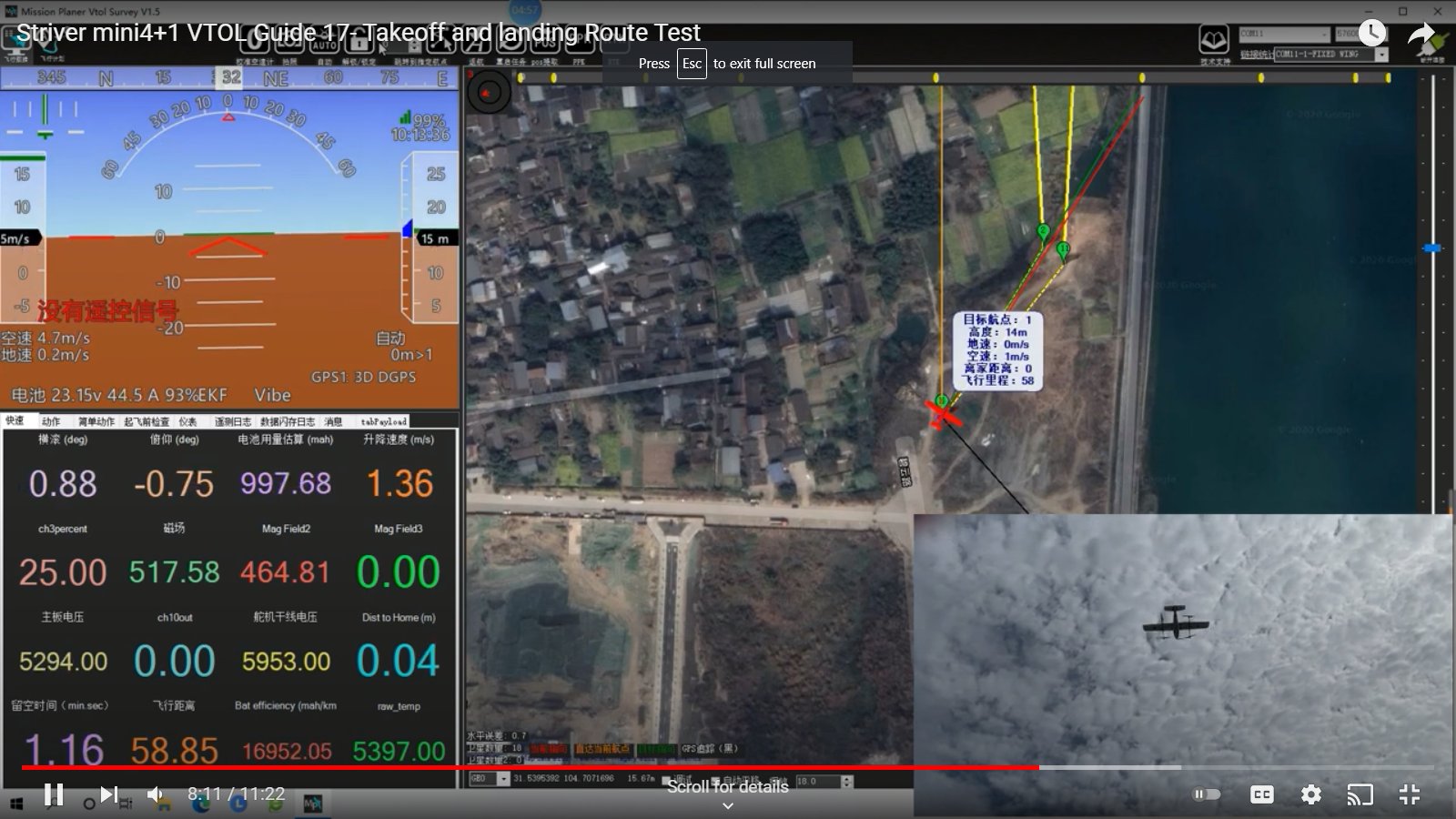
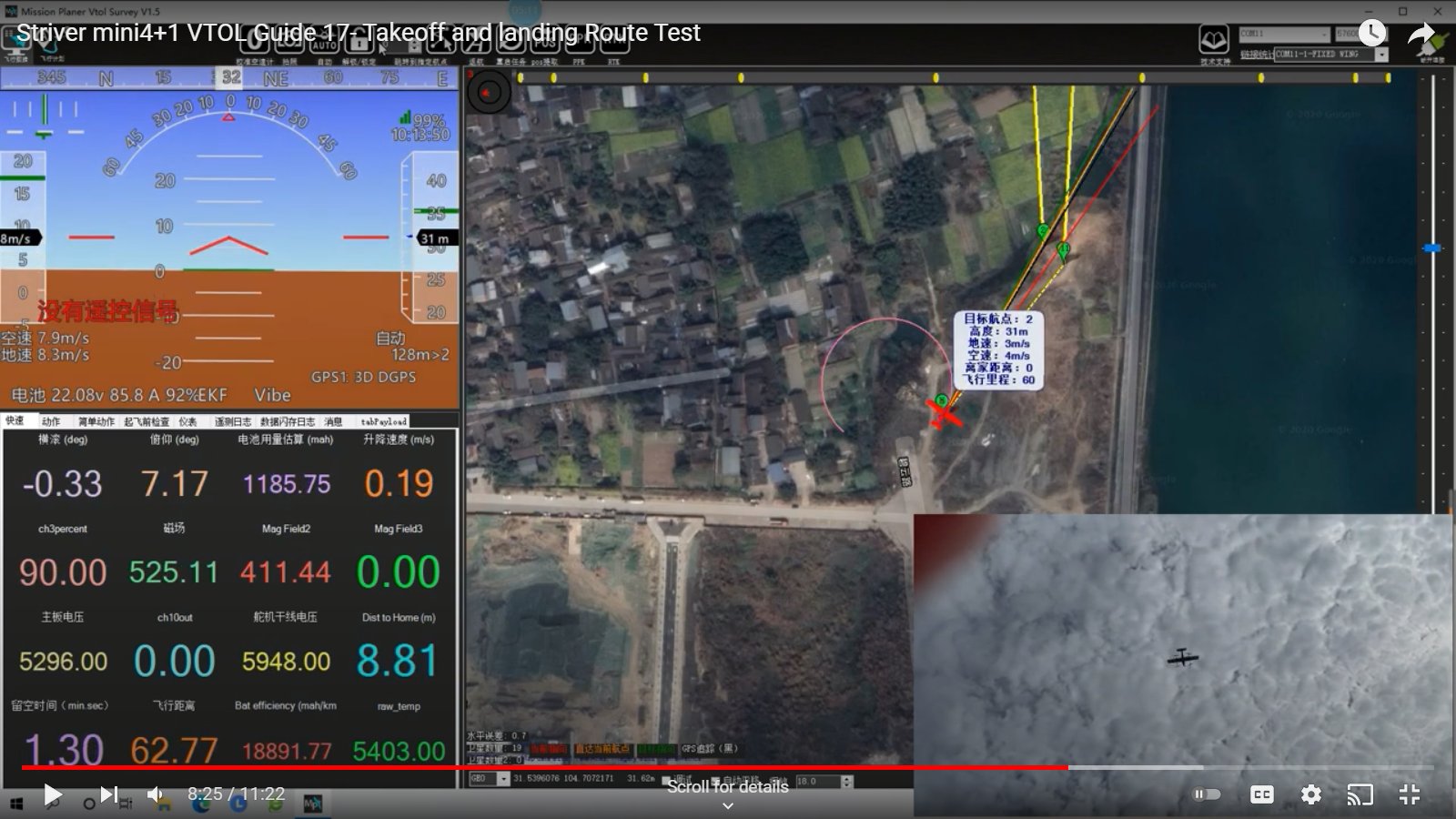
In the Striver 4+1 video below, you can get an idea of the current draw at various points along the test flight. Here is what I saw. The XT90 connector is rated for 100 amp duty ,designed to handle 100 Amps continuously without exceeding 80°C. I’m not sure what the surge rating is.
Hi, thanks to everyone for the valuable information shared on this thread. I’m about to finish my build and about to start with the FC configuration. I’m planning on using a Holybro Pixhawk but I’m unsure about Which firmware is recommended to use, the custom one provided by MFE or can I use the normal mission planner method to upload the stable version and then load the param file shared by MFE.
Thanks!
Use the normal Mission Planner and ArduPilot releases. I usually copy over the PIDs (both hover and forward flight) from the MFE param file to my clean param file from the latest stable build.
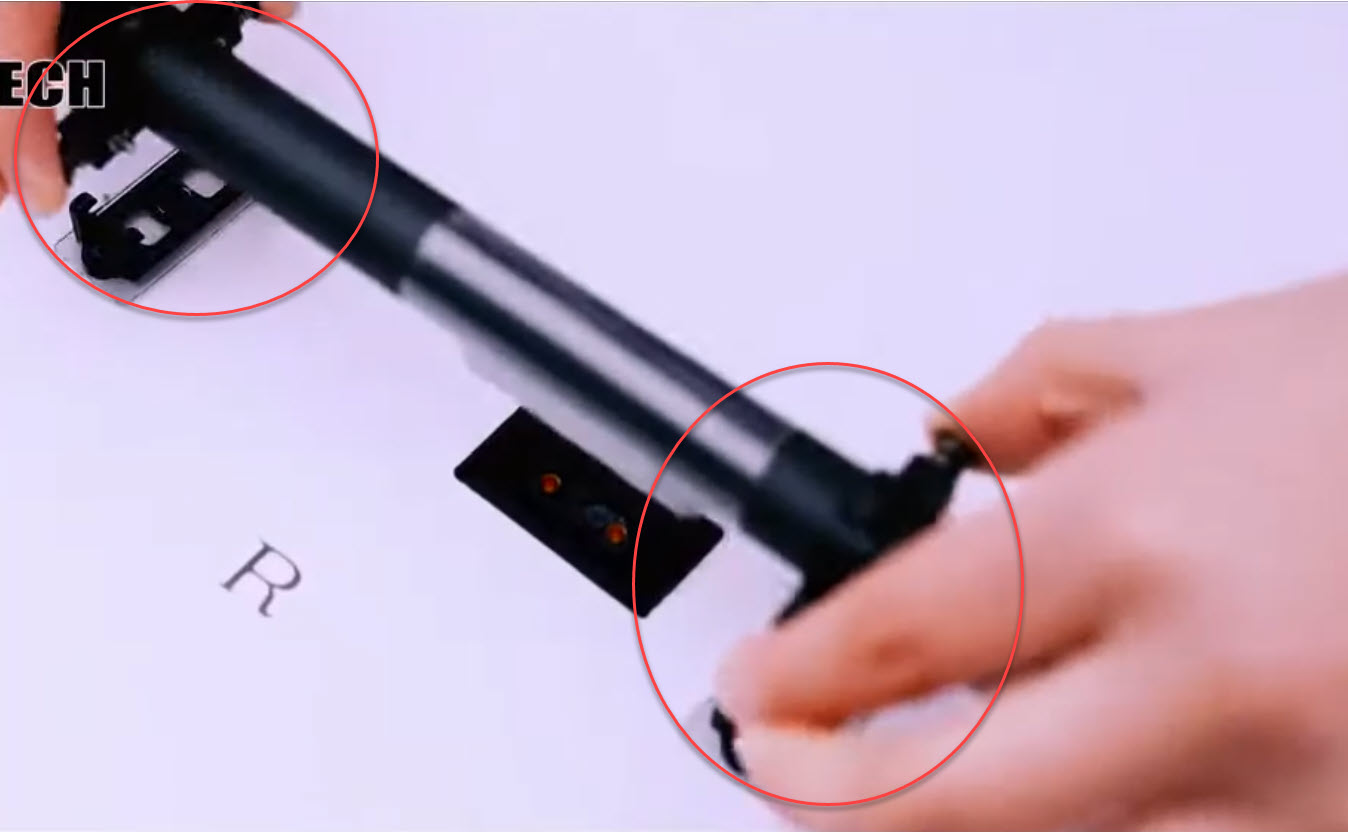
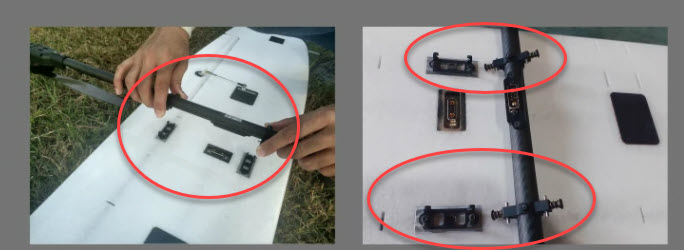
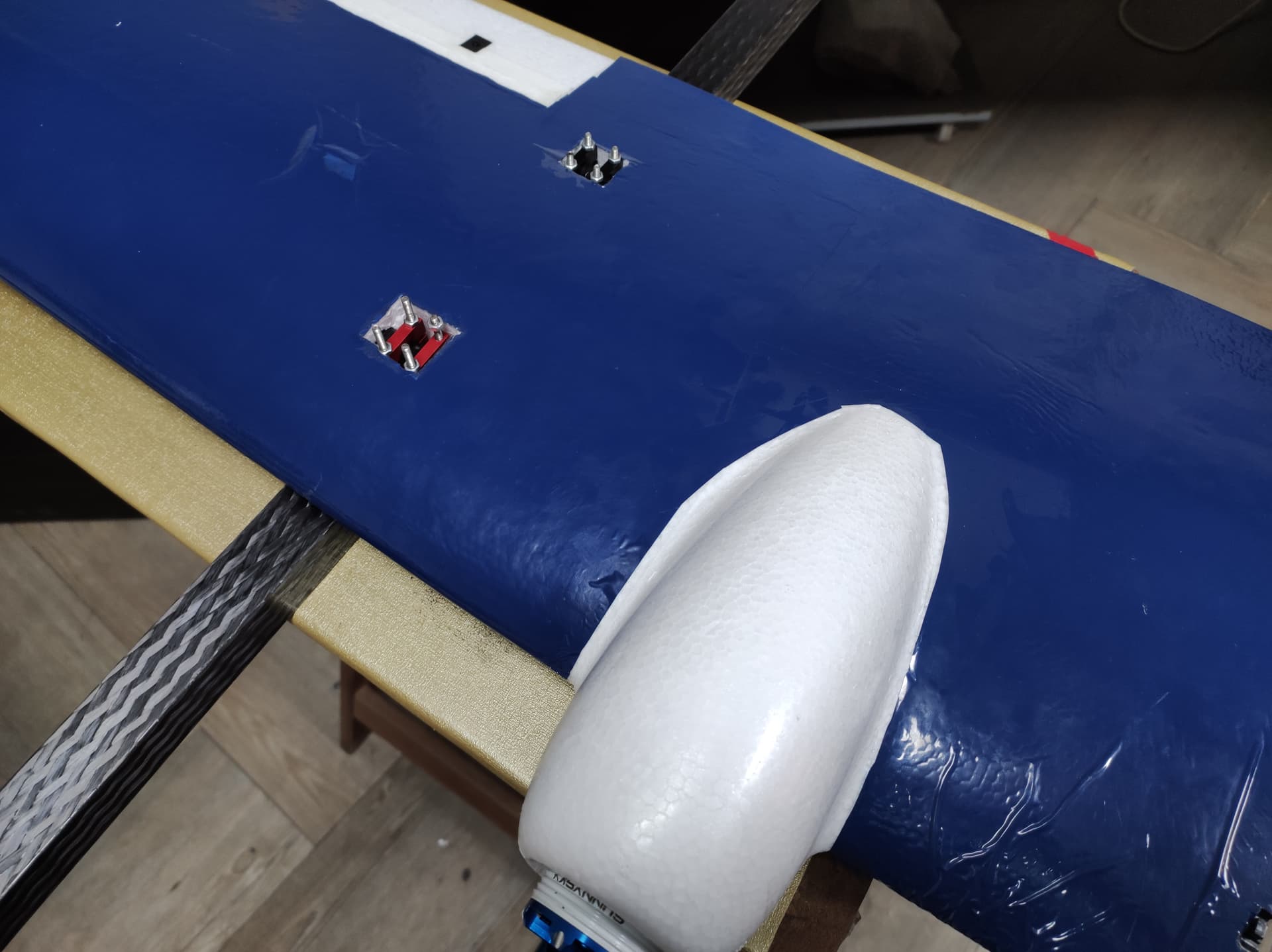
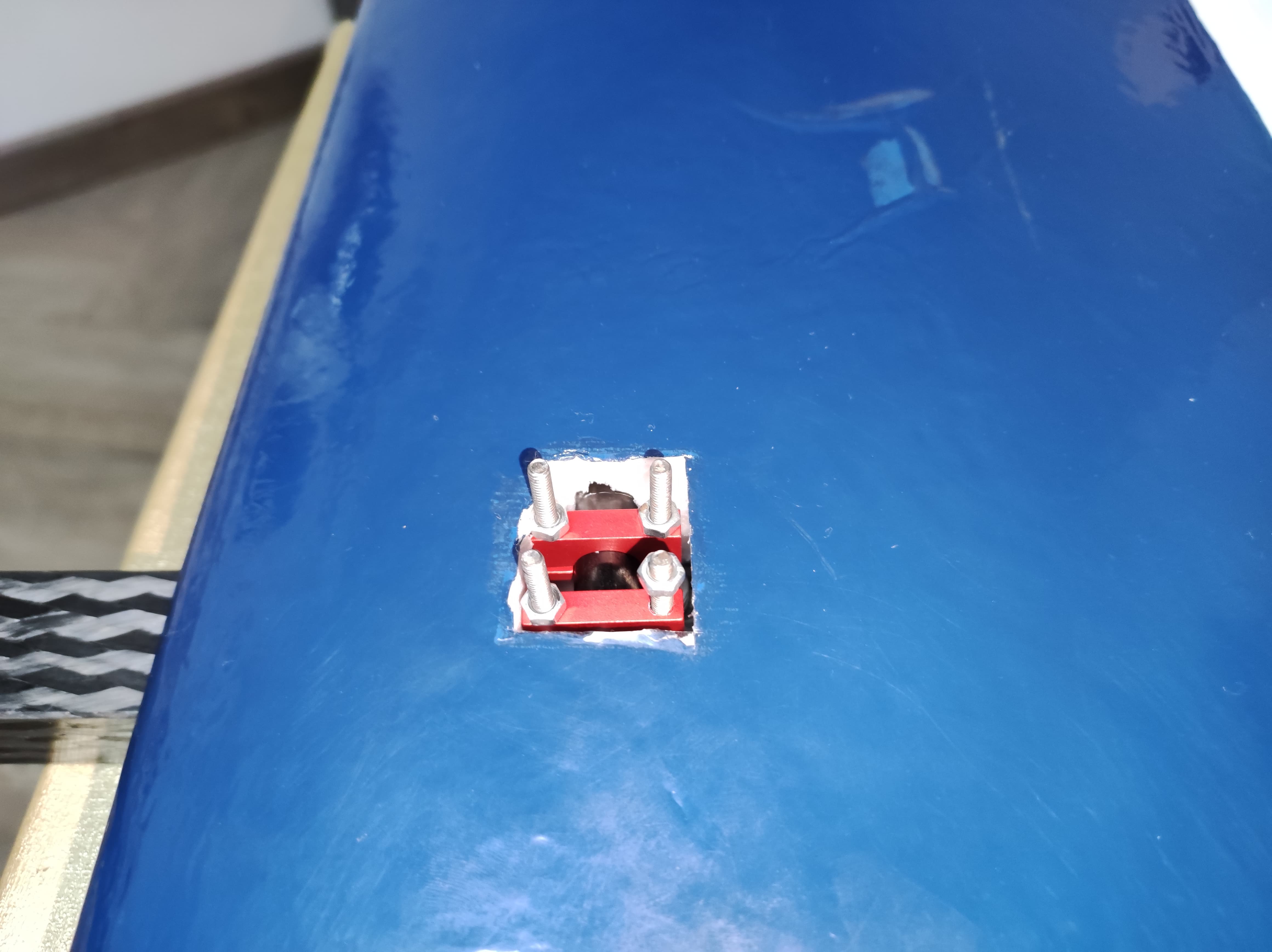
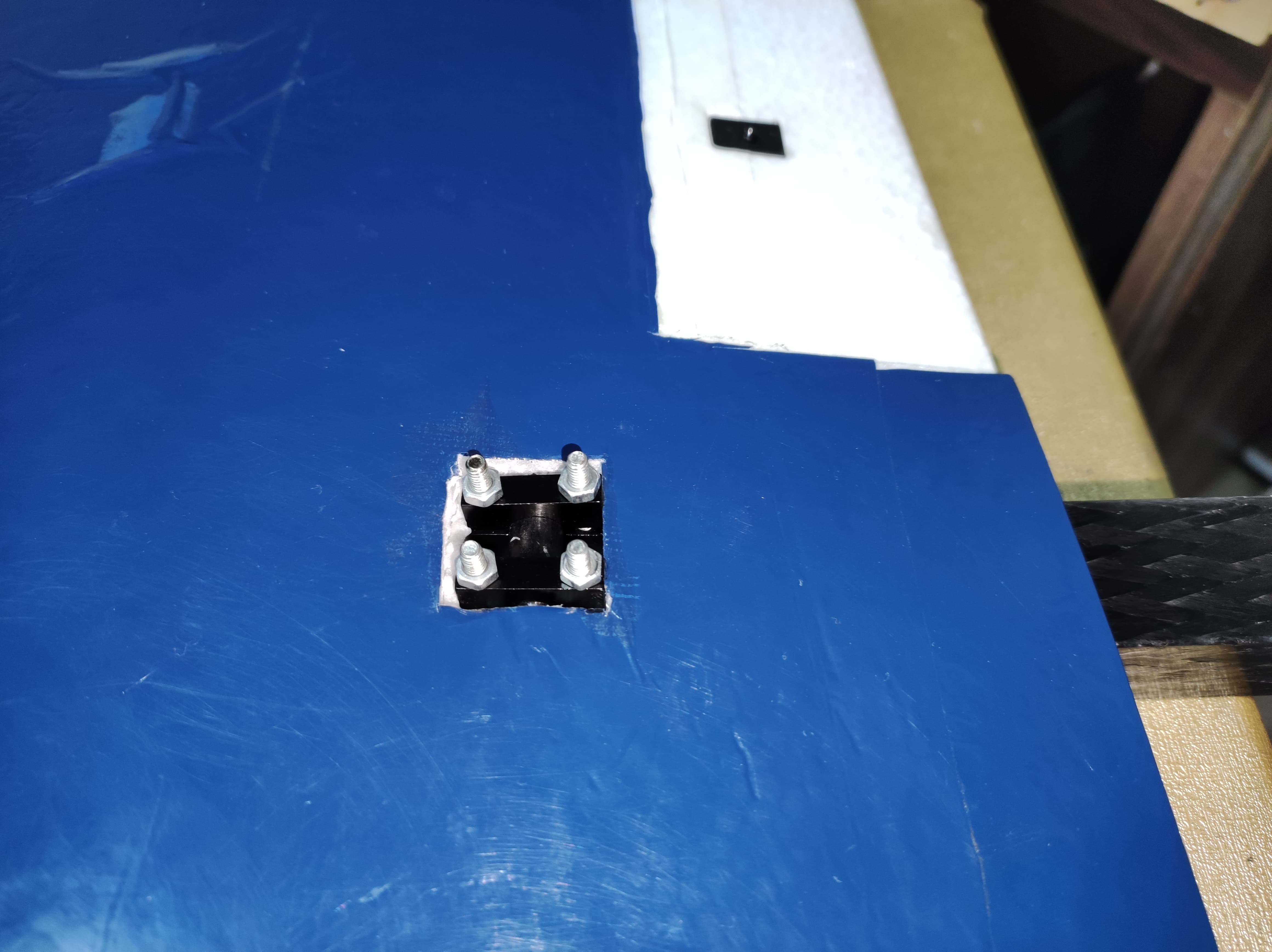
Does someone know where can I buy a "quick release tube clamp "?, It is the piece used to fix the “quad arm” in the wings. I add some images to show it. Maybe someone knows…thank
Could you tell me which would be the most suitable for both vertical and horizontal flight considering that I live in Mexico City at a height of 2,240.00 meters above sea level.
But with a 25000 mAh 10C 6S TATTU battery so I have an approximate weight of 7.5 kg. I already did a test flight, but to keep it stable in vertical flight I had to accelerate up to 75%. So I had to adjust the Q_M_THST_HOVER parameter from 0.3121451 to 0.405 so that the throttle stayed halfway. Is what I do correct?
I am not an expert at flying at high altitudes. Hopefully, someone else will post some tips on doing that. In general, you will want to increase your prop size at 6000 feet.
I haven’t built my wings yet. Is there room for a larger prop than 18x5.5 for the quad motors? My guess is that one end already goes over the wing area. The easiest fix may be to try some 18x8 or 19x5.5 props if you can find them cheap.
Yes, I believe that you are correct on adjusting the Q_M_THST_HOVER parameter. It can also learn this value in QHOVER or QLOITER modes by enabling Q_M_HOVER_LEARN. Sometimes it is faster to just adjust it yourself.
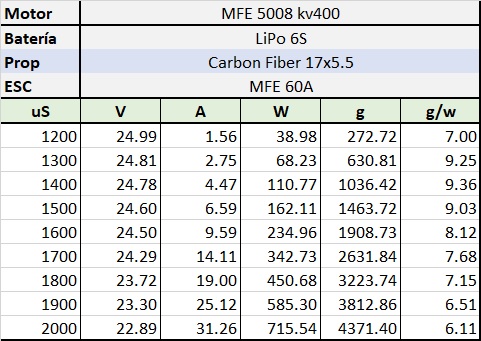
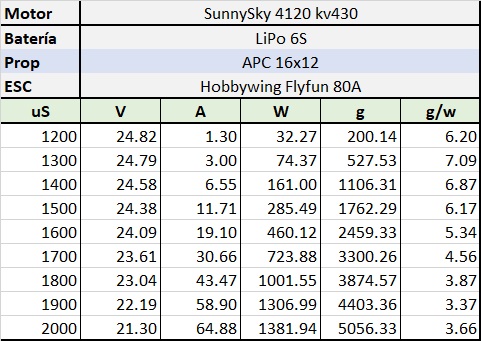
Hi, still working on my build. Last weekend I did some benchtest with the motors included in the kit, here are my results in case anyone finds them useful.
Mounted both vtol arms on the wings and front vtol motors.
Next step is to cut the vrol arms after determination of backward motors location based on CG.
I have a couple of questions:
How much wing twist should be allowed? Currently, on application of approximately 3kg force on one side of vtol arm, the back side deflects about 2 to 3 cm.
How do the front vtol motors effect the forward thrust motors when the front vtol props cover approximately half of the forward prop when viewed from the front? The current installation barely fits 12x12 inch APC props.
I apologise for hijacking this thread but it seems trivial to start a new thread when all the great minds are already in this thread. If im out of line, kindly let me know so I may move this to another thread.
Currently, its a test setup for testing hover soon.
Planning to use 6s7p LG HG2 Li ion battery first.
I have kept the motor spacing for 18 inch propellers. That might bw an overkill but considering the voltage drop, i think it is best to start with a larger prop first.
Any recommendations regarding the wing twist in the above post?
A bit of an update on my Striver Mini 4+1. I’ve done 6 flights now, and the plane is performing nicely with 4.1.x firmware. I’ve done both a VTOL tune and fixed wing tune.
I’ve also updated the default MakeFlyEasy parameters for 4.1.x, you can find the parameters here: http://uav.tridgell.net/MakeFlyEasy/
Apart from normal tuning, the key thing I needed to adjust was the Q_A_THR_MIX parameters, which needed to be much higher than normal in order to handle gusts of wind while landing. My flying site has a rising slope where I land, and the wind up that slope can destabilise the aircraft in the stage before it has weather-vaned around to nose into the wind.
I ended up needing a Q_A_THR_MIX_MIN or 0.4 for good stability in landing, which is above the max allowed in 4.1.3 and before, so in the 4.1.4 release I increased the allowed maximum to 0.5.
Overall the striver mini 4+1 is a really nice aircraft to fly!
Today, I had another flight in Qstabilize mode followed by QHover Mode.
One thing I have observed, the quadplane tends to move forward with no pitch input. Maybe it can be adjusted by Q_TRIM_PITCH as stated in the quadplane tips here: QuadPlane Tips — Plane documentation.
If the aircraft tends to move forward, then Q_TRIM_PITCH will be positive, right?
The quadplane also has calculated the hover throttle to be about 0.25. I am using 18 inch props at the moment which are surely an overkill and there is room to reduce the boom lengths by decreasing prop sizes. which will essentially also reduce wing flex. Is it recommended to go this route?
I seriously hope I am not spamming this thread. If I am, kindly let me know so I can move it to another topic.
For the wing flex, I was following the tuning guide at Tuning Process Instructions — Plane documentation, where after step 6 and a bit of manual decrease of D term, the flex is almost all gone. maybe it was due to the control loops overcorrecting. Either way, a significant decrease in wing flex is observed.
Step 7: Re-tried QHover which also performed much better.
Step 8: Yaw Bias while QHover is a mean of -0.04 with a peak variation of up to -0.12 at takeoff. Documentation states it should be less than 10%. Does that refer to peak-to-peak variation or should it be read as ±10%?
Hi @tridge Thanks for sharing your Striver parameters. I would be updating to 4.1.5 today and this would help considering that the default MFE parameters are out of date with the 4.1.x.
Hi Tridge,
Thanks for your updates on the Striver which I too am about to complete. I also got a Freeman 2300 tilt VTOL and loaded the MFE parameters. Have you flown your Freeman 2100 and done any updates on the MFE params so it will be compatible with the latest Arduplane stable firmware?