I had been posting in the Striver Mini thread previously regarding this conversion because there was much-experienced personnel there but it somehow felt wrong, hence creating a new topic and linking to the older posts.
After the above, I found some initial parameters suggestions in the copter topics where my settings differ for the following parameters mostly:
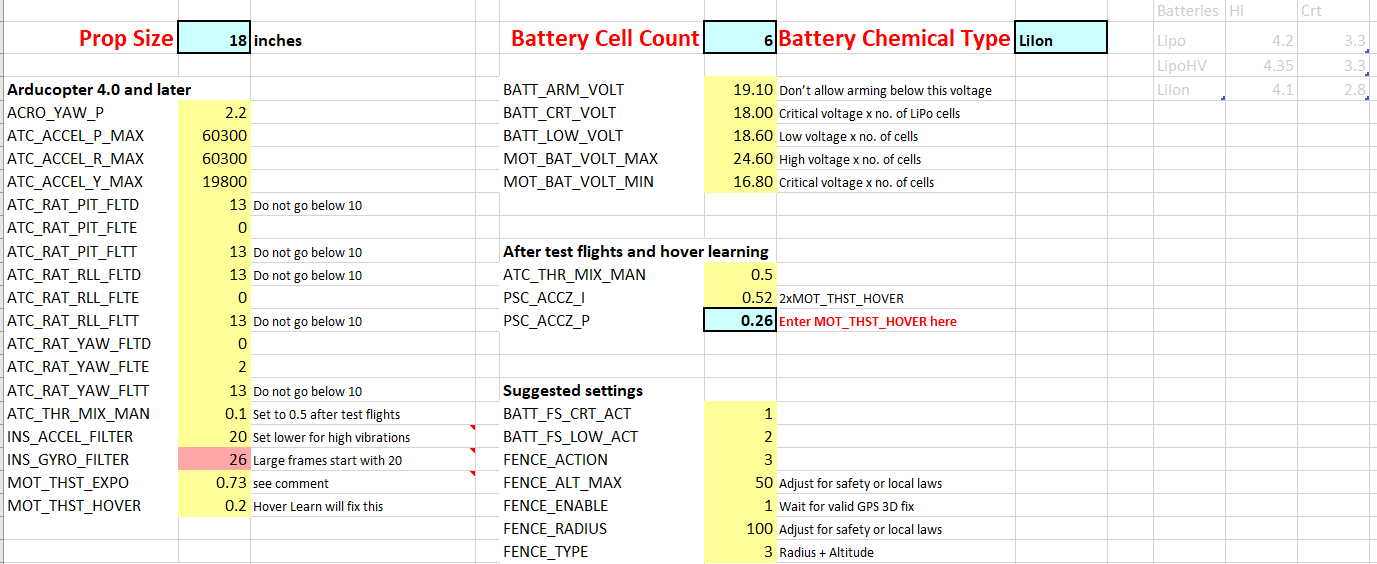
ATC_ACCEL_P_MAX, copter initial: 60300, value from vtol tuning graph: 60000 (approx)
ATC_ACCEL_R_MAX, copter initial: 60300, value from vtol tuning graph: 60000 (approx)
ATC_ACCEL_Y_MAX, copter initial: 19800, value from vtol tuning graph: 19000 (approx)
ATC_RAT_PIT_FLTD, copter initial: 13, value from vtol tuning graph: 11 (approx)
ATC_RAT_PIT_FLTT, copter initial: 13, value from vtol tuning graph: 11 (approx)
ATC_RAT_RLL_FLTD, copter initial: 13, value from vtol tuning graph: 11 (approx)
ATC_RAT_RLL_FLTT, copter initial: 13, value from vtol tuning graph: 11 (approx)
INS_GYRO_FILTER, copter initial: 26, value from vtol tuning graph: 11x2 = 22
Shall I move them to the suggested values by copter initial parameters or keep using mine?
Great to see that you’ve started this thread - it is definitely a consideration for me to convert a believer that can be used as a sub 7kg class VTOL. I’ll be very interested to see how your conversion works out.
I notice you’ve got an Emlid antenna on there, so I assume you run an M+ onboard? do you run it RTK or PPK? Do you have photos and details of your configuration inside the aircraft? I would be interested to see what you are running in there and also what your MTOW is when fully configured for a mapping mission?
I use it mostly in PPK mode. I am currently using the most worn out body for the conversion.
Configuration was simple. 6s7p LG HG2 Liion battery, t-motor 3520 motors with 13x10 inch props.
MTOW on a mapping mission is roughly 5200g
I have covered all of it with clear laminating film. That adds to a lot of weight. I shall take photos in a couple of days.
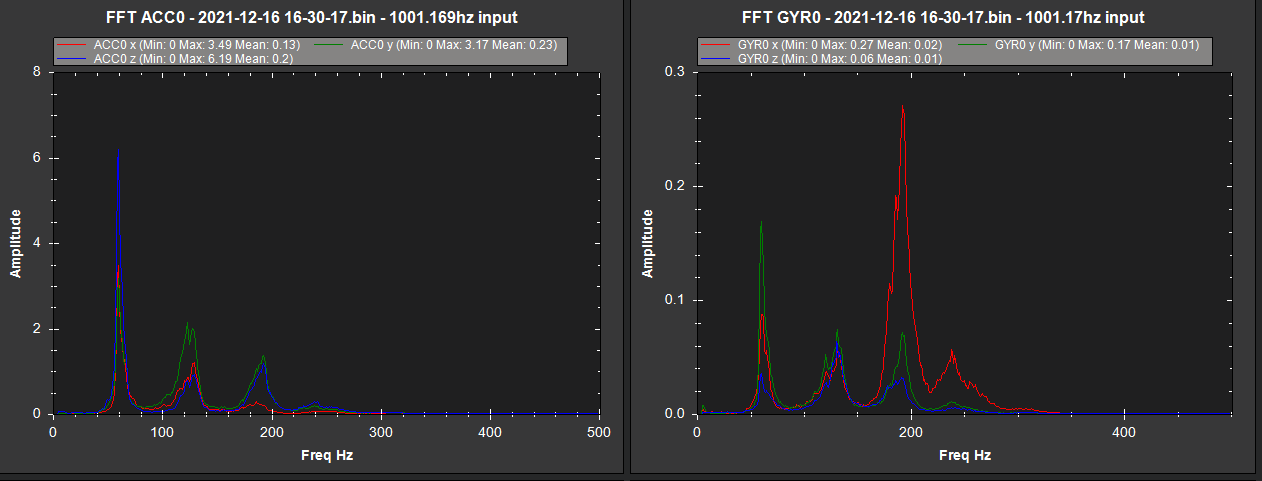
The example graph shown in the documentation has an amplitude peak of around 80 to 100.
However, my pre-notch FFT returns peak amplitudes of 8 to 10. clear peaks are there but at different places in Acc and Gyr
after much delay due to harsh weather and rains, I have been able to continue with the tuning of the aircraft and followed the tuning process up to manual tuning of roll and pitch. It seems to be quite stable in roll and pitch now with the actuall roll and pitch following the desired.
One issue that is being faced is I can not seem to get rid of oscillations in the yaw axis. According to the tuning process, Yout is to be observed for any misalignment in yaw axis abov 10%.
(Tuning Process Instructions — Plane documentation. )
My logs have a value of a mean of -0.04 i-e 4%. I have tried setting the yaw rates as described here Tuning Process Instructions — Plane documentation (Q_A_RAT_YAW_P : 0.5 x Q_A_ACCEL_Y_MAX / 4500). However, the value comes out to be 2.11 which causes many oscillations. A value of RAT_YAW_P = 0.1 can get the vtol to hover with minimum oscillations.
If anyone could shed some light on the above or point me in the right direction, it would be great. Furthermore, I am observing a PM.Load of 76% on the black cube. How safe is it to continue with this much processor usage?
Since the previous post, I managed to control yaw oscillations by re-tuning the yaw axis manually as per the following post:
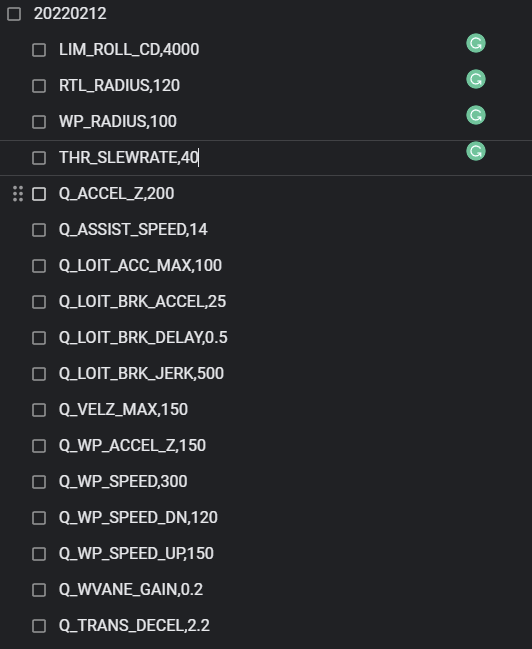
Some oscillations in yaw still persisted, however, by using some of the parameters shared by @tridge for the MFE Striver, they have almost vanished. A little overshoot on yaw still persists but I think that can be ignored. The following parameters were changed:
I remain skeptical of going into autotune due to the fact that I think the motors are a bit overloaded. The vertical flight time is in excess of 10 mins, however, the motors get quite hot after a regular flight of 3 minutes.
@Sunny52266 sorry for being so slow to respond.
One thing you could try is the new VTOL “quicktune” script, although you may not have enough memory for it on CubeBlack
@tridge Apologies for taking such a long time to report.
I replaced the autopilot with a cube orange and did a quicktune using the script.
The following is the log of quicktune:
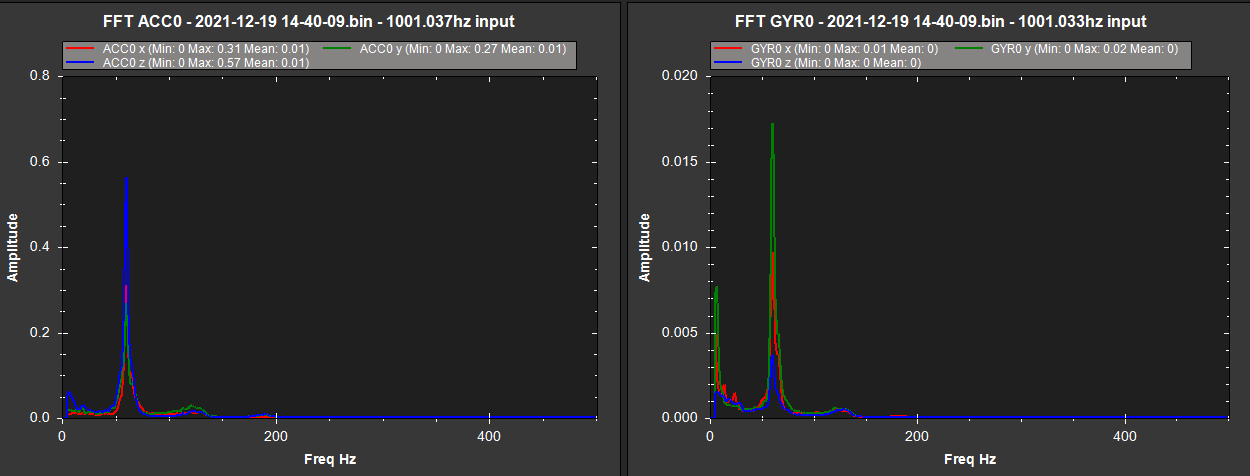
The following is the log after quicktune.
Yaw oscillations seem to be gone. however, there is some flex noticeable in the wings while the vehicle is yawing; about 5 degrees. Would you recommend continuing with the transition test in this case?