in acro the pilot controls the turn rate rather than the steering directly, auto sheet and manual rudder might be fun tho, i think we would have to have a new mode. I think there might be a parameter that allows auto steering with manual sheet.
maybe its easier to make a new mode than to change the current Acro mode but what I miss is not a manual rudder but a ‘simple and clear’ acro mode that just keeps the course using the stick rate and not change the rate depending on the ground speed or direction of the boat. I think that will be a very enjoyable and relaxing sail mode.
Anyway, now I understand better what is going on and what to expect.
Last weekend had better wind, not so shifty and just a bit stronger.
During this ~40 min video I had no gps or magnetometer warnings and the wind instrument seem very reliable even in weak winds.
(+) Acro mode seems to work as expected with the Wing. When I use rudder to tack it does flip the wing tail over in the correct way. Consistently.
Most of the time it succeeds to tack, if boat speed was too low then it could get stuck half way and fell back to original tack. But the wing tail was correct so just had to gain more boat speed and retry.
I think Pete mentioned before that the throttle stick on the rc should be in top position (sheeted out max) for the boat not to try sailing backwards. In my set up it works correctly having the rc throttle stick full down (max sheeted in). When I changed it around, then it worked backwards.
I think this is an achievement, this part of the code works - well done!
(-) I could not get Auto mode to work.
I am new to waypoints with Ardupilot so maybe I set it up wrong. Idea was to have two waypoints and the mission set to have the boat sail from 1 to 2 at beam reach and then just repeat that 100 times. Was planning to observe how it would perform and maybe make some trims.
This was uploaded to the flight controller but when I switch to Auto mode the boat just make circles. I try this 4 times in the video. The first time it seems it aims for the Home position, rather than wp 1, but I am not sure. Maybe it should?
(-) To get rudder steering in correct directions in Acro when Armed, I had to set the rudder direction so it was working in the opposite direction when in Manual unarmed mode. So when switching to manual mode out on the water, then the steering would be backwards, bit awkward. I feel really confused here.
hum, great that the wing sail is working!
not sure what is going on with auto, you can see its trying to go to WP1 because it puts the orange to current way-point line on it. Typicaly if acro works then auto works, maybe it was trying to reverse the whole way. Because you were having to put throttle down not up.
Sounds like some of your issues could be a mix up of reversed inputs and outputs, first step is to check all the rc input green bars are moving the same way as the sticks (except pitch but that doesn’t matter for us). Then you should change the rudder reversing such that its correct in manual mode, this should then be correct also in acro. Then in acro with stick fully up you should reverse (or not) the wing sail elevator such that it sails forwards.
thank you. I got it.

2 Likes
that’s a trimaran with foils right?
seems to have speed resources 
foiling mini 40?
1 Like
Just working on the bench at home to get prepared for sailing now,
Completed fine.
completed fine.
But,
is it really okay that if I arm it, then in manual mode, the rudder will turn the opposite way?
Is that something just to ignore?
This is not really cool and very counter intuitive. Why? Don’t try to answer that question ![]() - but I feel it should be turning the same way when its armed as well - why not?
- but I feel it should be turning the same way when its armed as well - why not?
yep!
this is not OK. Must be something odd going on. Armed in manual is backwards but disarmed it is correct? Might be worth updating mission planner, there was a bug that it would not display the reverse input channels correctly. The way to be sure is to turn off all the rc reversing params ( RCx_REVERSED) and do any reversing required on the transmitter. Or you could double check with QGC.
Where did you get the mini 40? I know of a guy in New Zealand, I think, who has done all sorts of work to be able to adjust the foils.
I got it second hand from someone who built it from a kit from Ian Holt, its one of these
There are not many about apparently, acording to the man I got it from this is the first with servo controled angle of attack for all the foils.
1 Like
Yep. That is the person I was thinking of.
1 Like
He was sailing over 18 knots in that video
Controlling the foils with the code must be a fun challenge
Anyone know of a foiling rc sailboat that do not have a fixed rig?
Just a mast without support of wires, similar to the Laser?
I need to be able to assemble and dissemble when going for a sail but been eying foils for a long time.
Or, can you just set a wing sail on such darling?!
B t w there are lots of Ian’s around.
The guy who developed the ready to sail foils to the full size laser, Mr. Ian Ward of Glide Free Design, was kind enough to point me to a mr. Ian Holt …
I have been working with Ian Holt with his Mini40 trimaran foiler. He is based in the Philippines and is developing foiling trimaran RC models.
This world does not appear to be so big
2 Likes
Correct.
What is QGC?
Something is not working good here.
QGC is Q ground control, its a mission planner alternative. Personally I think mission planner is better but its handy to have a second option to diagnose issues like this.
Aha okay, will try with Q ground control.
b t w I did upgrade Mission planner on the PC (it was only down loading things and restarting when I clicked on the button, beta version, or something). I also check directly the RC1_REVERSED setting and its the same as and follow the changes in the Initial set up pages.
With QGC connected to the board, it reports an error:
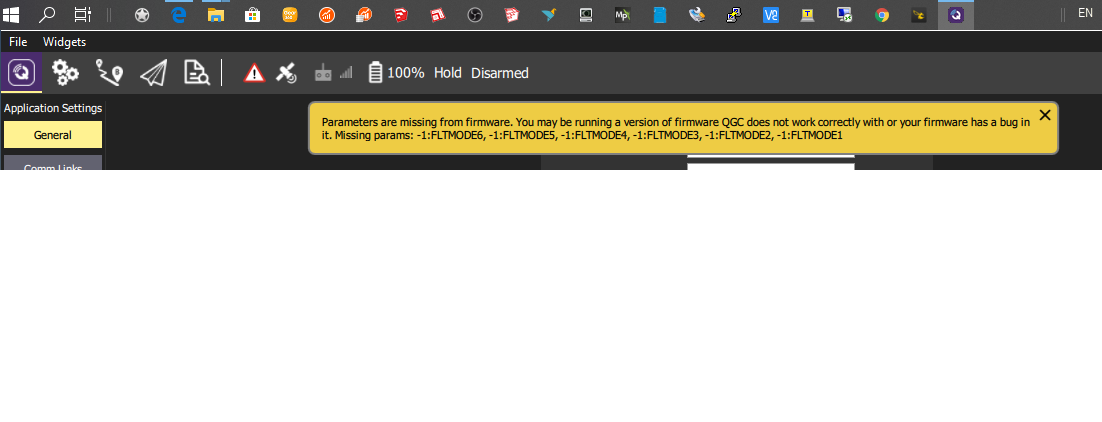
Have no idea what that means, flight modes seem okay…
Don’t let a rig with stays on it discourage you. I have an EC 12 and I can break it down for the car in 2 minutes. It takes maybe five minutes to rig it after getting it out of the car
I know somebody who was in communication with him. I had suggested that linear servos be used for the foiling surfaces. I think that was the route he used
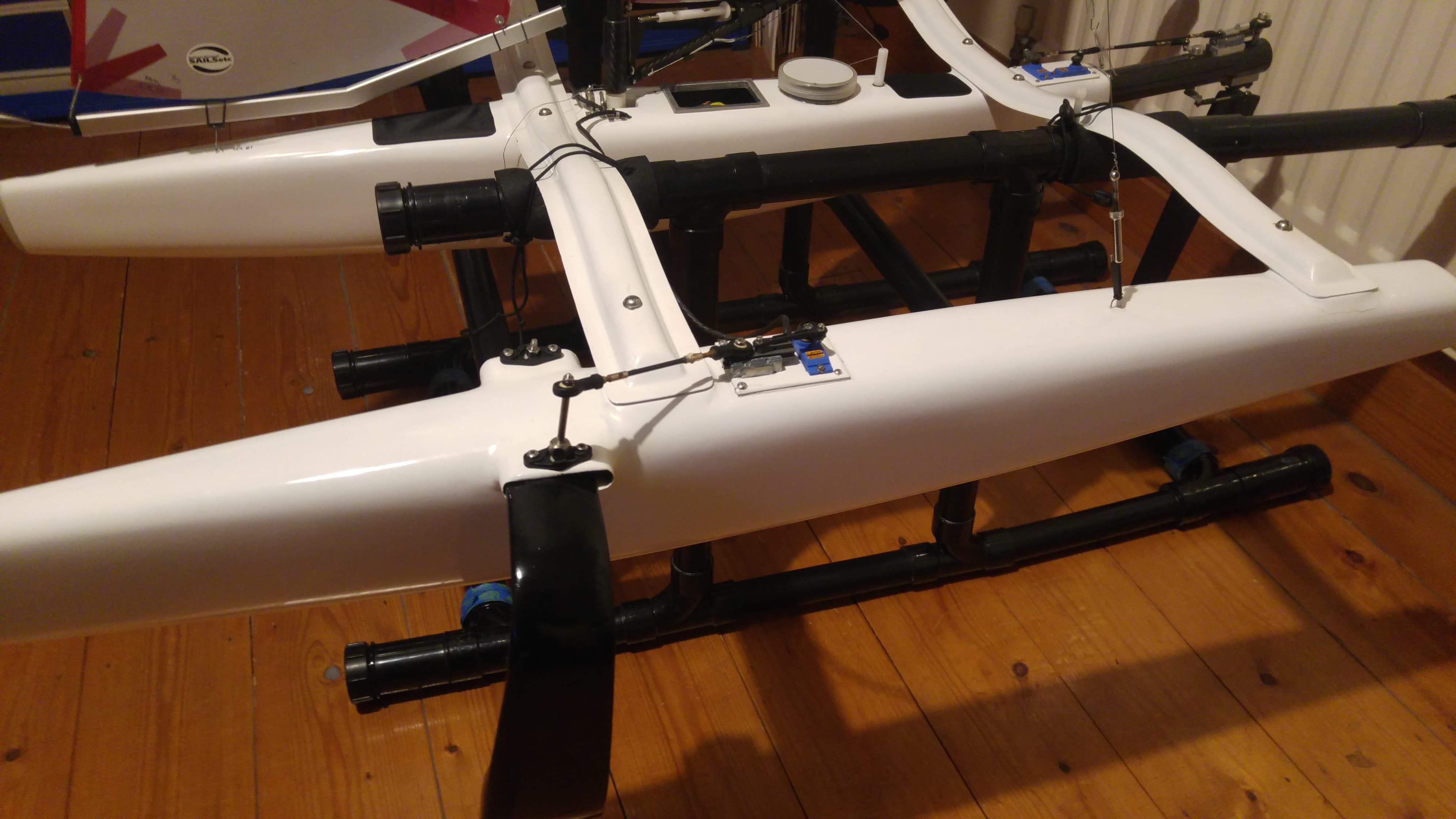
mine has this servo with linear slider arrangement, not how I would have done it but I think with PID control the linearity shouldn’t matter too much
I thought it would draw less power and be an easier load for a linear serve than a servo arm on a rotating one. Just my opinion.