I got it second hand from someone who built it from a kit from Ian Holt, its one of these
There are not many about apparently, acording to the man I got it from this is the first with servo controled angle of attack for all the foils.
I got it second hand from someone who built it from a kit from Ian Holt, its one of these
Yep. That is the person I was thinking of.
He was sailing over 18 knots in that video
Controlling the foils with the code must be a fun challenge 
Anyone know of a foiling rc sailboat that do not have a fixed rig?
Just a mast without support of wires, similar to the Laser?
I need to be able to assemble and dissemble when going for a sail but been eying foils for a long time.
Or, can you just set a wing sail on such darling?!
B t w there are lots of Ian’s around.
The guy who developed the ready to sail foils to the full size laser, Mr. Ian Ward of Glide Free Design, was kind enough to point me to a mr. Ian Holt …
I have been working with Ian Holt with his Mini40 trimaran foiler. He is based in the Philippines and is developing foiling trimaran RC models.
This world does not appear to be so big
Correct.
What is QGC?
Something is not working good here.
QGC is Q ground control, its a mission planner alternative. Personally I think mission planner is better but its handy to have a second option to diagnose issues like this.
Aha okay, will try with Q ground control.
b t w I did upgrade Mission planner on the PC (it was only down loading things and restarting when I clicked on the button, beta version, or something). I also check directly the RC1_REVERSED setting and its the same as and follow the changes in the Initial set up pages.
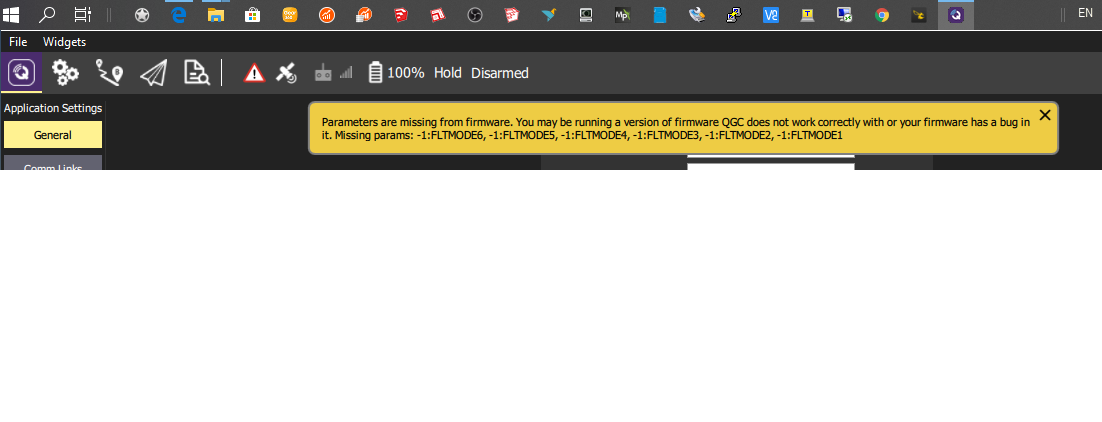
With QGC connected to the board, it reports an error:
Don’t let a rig with stays on it discourage you. I have an EC 12 and I can break it down for the car in 2 minutes. It takes maybe five minutes to rig it after getting it out of the car
I know somebody who was in communication with him. I had suggested that linear servos be used for the foiling surfaces. I think that was the route he used
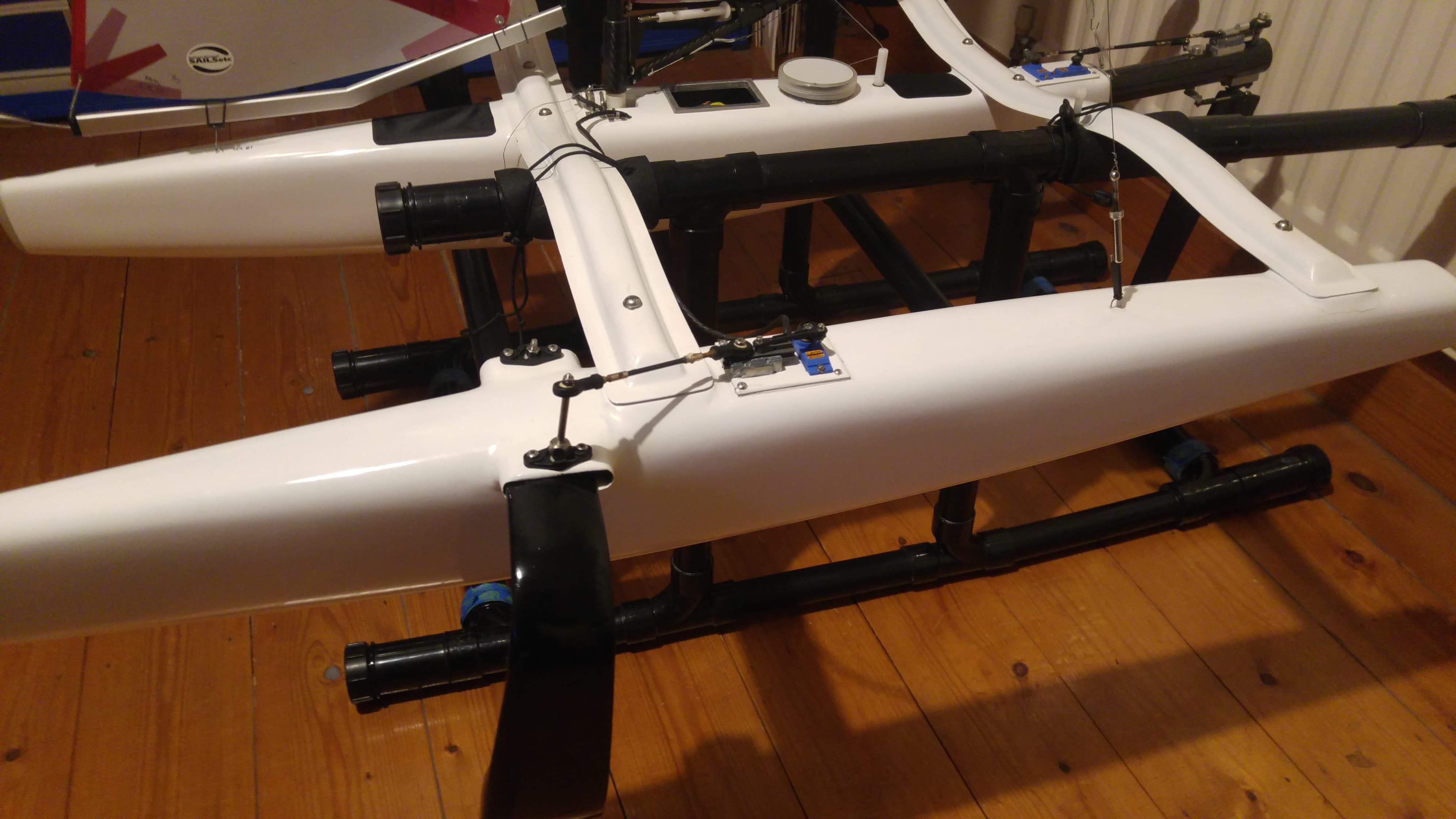
mine has this servo with linear slider arrangement, not how I would have done it but I think with PID control the linearity shouldn’t matter too much
I thought it would draw less power and be an easier load for a linear serve than a servo arm on a rotating one. Just my opinion.
That’s encouraging to hear thanks David
@iampete, the error text sound serious?
Parameters are missing from firmware. You may be running a version of firmware QGC does not work correctly with or your firmware has a bug in it. Missing params: -1:FLTMODE6, -1:FLTMODE5,-1:FLTMODE4,-1:FLTMODE3,-1:FLTMODE2,-1:FLTMODE1
I have tried flashing your last code to another Kakute board but with the same error text when connecting it to QGC.
Then I tried flashing it with the version from July, this one
ArduRover V3.6.0-dev (84ba6e85), KakuteF7 001D0029 32365103 30383430, ChibiOS: d0f13540
Still the same error message.
Maybe there is something fishy with my flightmodes…
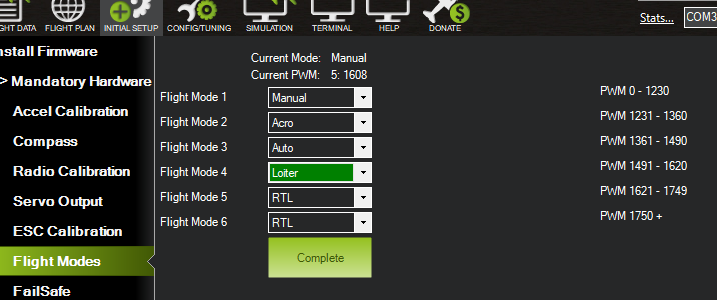
I want to have 5 flight modes. But it seems Mission planner always sets 6 flight modes. After radio calibration MP seem to bind 6 flight modes to 6 different ranges of RC5_ pwm values.
In my case where I have 5 different switch modes set on my TX, Mission planner skip from mode 4 directly to mode 6, not passing mode 5.
My PWM values from the tx are
Since I want my mode 5 to be RTL and MP skip it, I have put mode 6 to be RTL.
Is there somewhere I can set the ranges or I have to hit within these ranges with setup in the transmitter?
Can this be part of problem?
Stuck here…
nothing to worry about, QGC is not as upto date with the latest firmware as mission planner. I would just do the QGC radio calibration and go back to MP.
The ranges are hard coded in ArduPilot so you have to match them with you transmitter mixer.
After using QGC or maybe after updating the MP it seems to be working as it should.
Rudder turns correct direction when unarmed in Manual and Acro and when Armed in manual turns correct. We just disregard what ever direction the rudder turns in Armed and Acro since there is no gps fix. So now I am back to MP.
Just noticed that the Servo2 functionr 124 (wing rudder) is not blank but has a name: RateRoll.
Hoping for weather to test Acro, Auto, Rtl etc on water again.
Some one got that servo function into master before we got the wing sail stuff in. 124 is still correct for your firmware but it will get a new number when it gets in to master.
Okay thanks for letting me know
I was at the lake this afternoon but you cant believe I was stopped from sailing by a pair of black super aggressive swans 
They followed me around and I could not scare them off. Afraid they will snatch my fpv camera with antenna off of the stern of boat.
I met them before but then with my speed boat and then I run them over, but with a slow sailer, I don’t want to risk it.
winter and ice is coming soon 
I have found swans quite relaxed on the water, they get agressive on the shore tho.
ice boat…? ![]()
Haha Yes, maybe cool on the water, but
This pair was following me along when I walk on the ‘beach’ to prevent me from going to the water. I thought I had moved them away down the beach and then disappear to launch the boat - speed boat. But they were very cunning and showed up…
let me get back on the topic of ice sailing boats…
yesterday the first snow came and its now around -5 at nights and freeze the lake but melts during days, fear I will not be able to conclude the test of the wing code before winter. Maybe there will some better days when I can go, let’s see.
For the ice and land version of the boat I came to the conclusion to build a frame that can fit on to the boat so there will be no need to build new set up of flight controller servos etc. The frame should ideally have the option to swop between wheels (on land) and skate blades (on ice). I have seen several examples on the net of people doing frames for lasers but they are far from good and there are many hardware issues to solve. It needs to be light, strong and stiff yet bet attachable and detachable in an easy way.
At the moment that project feels a bit daunting 
Short update on the mini 40 progress, got a Orange Cube (Thanks Hex!) in a waterproof project box. The box is bolted to the existing mounts in the boat, the idea is that you can unscrew the lid to get to the bolts to unscrew the whole box. Hopefully a bit of silicone will make it watertight to the hull. Got a few holes to patch and a few to drill.