Thank you Pete, I have changed the setting to 124 and there are some progress.
I still get so tired of all the unexpected results of this.
Now the sail sheeting that worked perfectly before don’t move but is replace with movements on the tab servo.
Now in better balance - sorry all.
After flashing the last .apj file to the board I realized I had to set Enable Sail to 1 and set wndvn to 4, and also MP tells me I need to redo a 3d accelerometer and magnetometer calibration.no worries, will do when I can get outside.
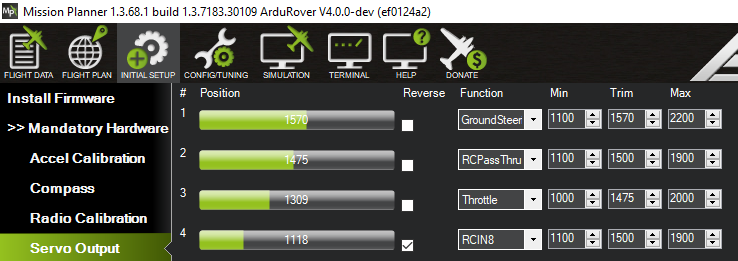
This is what is working so far when in Manual and armed mode:
- Servo1 - the steering of rudder fine
- Servo2 - the control of the wing tab, if using RCpassThrue,
but not if set to function 124, then nothing happens. - Servo3 - This is the main sail and should not be throttle but function 89, but maybe with the version of code you should be set to Motor throttle?
Anyways, it moves when TX stick moves. - Servo4 - this is the motor, the air prop and it works fine.
Not sure how to move from here…
All my kindest regards
Karl
I think it just also sets throttle to servo 3, its a common thing on planes. You should just be able to change it to Main Sail, when in manual mode the wing sail output should be identical to main sail. It might need a reboot after setting the outputs before they will work properly.
Hi all,
This is the talk I gave on ArduPilot Sailboats at the CubePilot conference 2019.
3 Likes
Thanks Pete, yes, servo 3 now set to main sail and servo 2 set to function 124.
Then main sail moves as can be expected in manual mode when sheeting.
The wing sail output now follows the main sail movement, but only in one direction. It stops at trim setting ~1400 and will not go lower down to 1000 as should be expected?
While we are at it, the motor switch modes of 1, 2 and 3 are they also in this code?
hum, what mode is it in?
yep, RCx_OPTION 74, you will have to set you motor output to throttle rather than pass-through
its all in manual mode.
That’s why I think it does not add up.
 that works better
that works better
Got a new problem, MP say GPS: No GPS
need to track that down
EDIT
It was the setting of SERIAL3_PROTOCOL was set to 0 not 5 for gps 
Next heading for the lake…
sorry Pete, things still don’t seem to add up here.
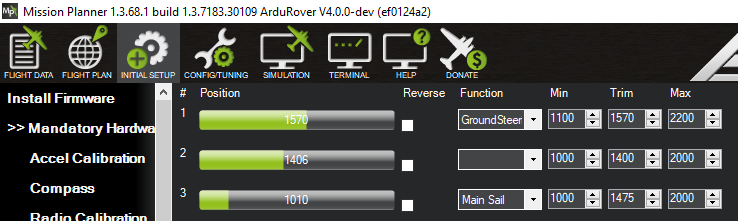
After configuring the servo and motor the output still do not follow the main sail in more than one direction. Look at this picture.

Main sail is down to 1000 but neither wing tab nor Throttle at out put 8 want to follow that low.
I can not take her to the water like this.
You want me to upload the settings file?
Maybe I did mistakes…
Hum, the only other think i can think is that if you throttle is setup for sailing it may not have the full range. This would be the case if the mainsail uses the full travel of the stick.
To fix you can re-center the throttle trim this would be RC3_TRIM to 1500. Unless you have changed the throttle input channel.
Sorry its so buggy normally I can get most of the big bugs out in my testing. Without a wing sail I haven’t been able to test it myself. Although I did run it in the simulator and it seemed to be doing the right thing in auto-trimming modes.
Thank you Pete and really no worries at all
I can never do what you do so I am soooo thankful.
If sometimes I blow out steam its never directed towards you or any person
I will get to it again coming week.
Best regards
K
1 Like
YES ![]()
I would never have guessed that but now can move forward.
I plan to take her to the water tomorrow.
How can I expect the SAIL_HEEL_MAX (set to 15 deg) to work?
Will the wing control move to center when its exceeded or maybe not implemented yet?
Also, will that work in Arco or just in Auto mode?
I nearly capsized the boat without knowing it when sailing manual…
yeah, should all work
it moves to the centre with the PID heel controller
It will work in all modes.
The only issue may be that it trys to sail backwards, note that it will try with a wing sail. In Acro with the throttle all the way up it should go forwards, if not you will have to reverse the servo.That would be SERVO2_REVERSED, or the ticky box on the servo output screen.
Thanks Pete,
Yesterday was too little wind to bother but today looked better so had some 2 hours at lake.
Wind weak and very shifty, think I was there while it changed from northerly to southerly but was the only time slot I had.
Several things to figure:
- sailing in manual mode and then change to acro will always flip the wing sail in the opposite direction it was in manual. this took a long time to figure out.
so in order to get acro mode to work correctly these are the steps:
a. sail in manual mode and have good wind and boat speed
b. change the throttle stick from max to min or from min to max, depending on your tack.
c. then flip the mode nob on tx from manual to acro.
then it will work correct. If you done to b. above it will work incorrectly.
i know this is not a matter of reversing servo2 as you suggested, since i tried it and its just opposite but still wrong.
- when I say it works, its really- kind of working…
If you keep the course all is pretty fine, but if you try to tack things will get messy.
Boat will not follow through the tack but get stuck even though I know the wind speed is enough for tack in manual mode. seems the wing and the rudder is not coordinated properly to make the tack happen. Sorry cant be more specific after today.
-
When shifting to Acro, then sometimes, but not always, the steering will go in the opposite stick direction
 This is when I flip out, and just don’t understand this. Of course there is some logical explanation but at the moment it just seems a goast is present.
This is when I flip out, and just don’t understand this. Of course there is some logical explanation but at the moment it just seems a goast is present. -
I also tried running a simple mission with 2 wp’s in a loop.
at time of engaging the Auto mode then flightcontroller started to complain about compass variance error. not really before. and the boat was steering away from wp 1.
All in all, i am pretty okay with todays session.
I just accepted there are lots to solve here and then started to sail in manual mode, had a beer and i really starting to enjoy the wing sail on the boat.
I have some videos but not worth uploading.
If you can have some suggestions on point 1. it will be very helpful.
K
hum, I the vid’s would be interesting. If you have a log that would be great.
Because we now have the throttle trim at centre stick you have to raise the throttle above centre to go forwards in acro and bellow centre to go backwards.
This could be if its just starting to drift backwards, or at least the gps thinks its going backwards, this is a known issue with rover but its hard to find a nice fix. The new wing stuff has not touched the steering at all, although there could be some other change to rover from your previous build.
Thats the main thing ![]() !!
!!
In all the cases I had it either above or below center stick when I tried to switch from manual to acro mode. Would it really be expected to flip the wing to the opposite side regardless if above or below?
After 1 min there is a shift from manual to arco to illustrate what I mean.
after 12.30 there is a shift to Auto.

Anyway, there are the two kind of logs I have from the first sailing yesterday. one is called .rlog
https://drive.google.com/open?id=1XWGyfprHpkIwccbss3pas8kxpAp-Bf-i
and the other .tlog
https://drive.google.com/open?id=17PIafNxbNMnpBoGCe4iokveWcUjlgHcK
While I am at it, here is the setting configuration of the Kakute board as well.
Laser ArduRover 4.0 (1.4).param (18.5 KB)
Will try to sail with the standard soft sail and see if all things works as can be expected. That could reduce the number of uncertainties for troubleshooting the wing sail.
The vid is useful, to me it seems to be doing the right thing in acro, not sure what was going on in auto.
I think it depends on the tack, on one tack the stick will be correct for the switch to acro going forwards, the other tack it will switch to acro trying to go backwards.
It’s hard to tell for sure in such low wind, looks shifty too, or at least the vane thought it was shifty. If your finding its better not to use full stick in manual it’s better to trim the new servo output such that you do use full stick. In auto modes currently it always uses ‘full stick’.
I will have a look at the log this eve.
Thanks.
Yes, the wind was low and very shifty (about to change direction those hours).
I will redo the magnetometer calibration that I had it was not completely done after sw update.
There are some better winds forecasted for this Sunday.