After months of beta testing Rover-3.5.0 has been released as the official/stable version and will be available for download through ground stations including the Mission Planner and QGC within the next few hours.
The changes are listed in the ReleaseNotes and also copied below.
Changes from 3.4.2
- ChibiOS provides improved performance and support for many new boards including:
a) F4BY
b) TauLabs Sparky2
c) Furious FPV F-35 lightening and Wing FC-10
d) Holybro KakuteF4
e) Mateksys F405-Wing
f) Omnibus F4 Pro, NanoV6 and F7
g) SpeedyBee F4 - BalanceBot support
- Sailboat support
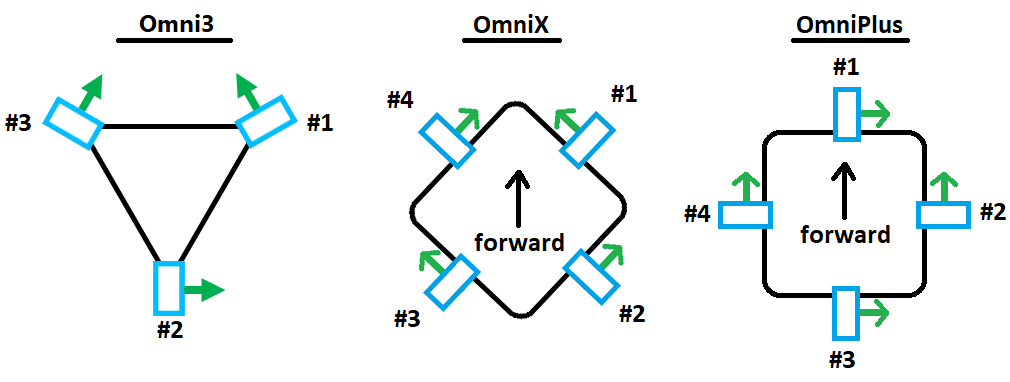
- OmniPlus, OmniX frame support (vehicles can move laterally using 4 thrusters or wheels)
- Mode changes:
a) Follow mode (allows following another vehicle if connected via telemetry)
b) Simple mode (pilot controls direction regardless of vehicle’s heading)
c) Loiter can be configured to always drive towards target (i.e. does not reverse) (see LOIT_TYPE parameter)
d) Guided, RTL, SmartRTL will reverse towards target if DO_SET_REVERSE command received (via telemetry or as mission command)
e) Boats hold position after reaching target in Auto and Guided (also see MIS_DONE_BEHAVE)
f) SmartRTL default num points increased to 300 - Auxiliary Switches expanded to many channels (see RCx_OPTION parameters)
- External position estimates accepted from ROS and Vicon systems
- MAVLink message interval support (allows precise control of mavlink message update rates)
- Safety Features:
a) RC and GCS failsafe timeout shortened
b) EKF failsafe added and checked before entering autonomous modes
c) Object avoidance enabled in autonomous modes (Auto, Guided, RTL)
d) Safety switch ability to arm/disarm vehicle now configurable (see BRD_SAFETYOPTION parameter) - Bug fixes and small enhancements:
a) Object avoidance fix to include all sectors from proximity sensor (aka 360 lidar)
b) Onboard OSD support (for ChibiOS-only boards)
c) Gripper support
d) Sprayer support
e) Wheel encoder offset fix
f) Avoid potential divide-by-zero when waypoints are almost in a straight line
g) Cruise speed/throttle learning always runs for 2 seconds (saves user from having to lower switch)
There is still at least one known issue (DShot support) that we will resolve in a follow up “point” release. Some wiki updates are also required which we should get to in the coming weeks.
If you have any issues with this release please post below or create a new topic in this Rover-3.5 category
Thanks to those in this forum that helped out with beta testing, it was very much appreciated!