Hi,Randy!
It’s an exciting news,especially adding the FOLLOW mode to ardurover V3.5.
I tried to simulate it in two ubuntu virtual machine, and connected to QGC, but failed. So,
can the follow mode be simulated in Ubuntu by sim_vehicle.py…command line, or other way?
can follow mode be used in QGC?
If possible, can you give some suggestions? Thank you!
@Russj, it should be there. Perhaps the internet connection is not working correctly? Or maybe try the Help >> Check for Updates button - I think we have made some changes to how the firmware was stored when we moved to ChibiOS so perhaps this has caused some problems for older versions of MP.
@Nando
You’re right, thanks for pointing that out!
I think the arrows you put in the picture show the correct behavior for the motors, and the table describes the forward and right turn behavior correctly, but following the arrows for right lateral it should be:
M1: - , M2: +, M3: + since the arrows show M1 moving in negative direction while M2 and M3 moving in a positive direction.
If you do agree on that, then the matrix in the code that describes the arrows should look like this:
btw, the motor count starts from 0 in the code, so 0 is M1, 1 is M2, 2 is M3. Also, the columns describe throttle. steering (rotation) and lateral respectively.
What do you think?
Here’s what I found >
Check for updates button >> no updates available.
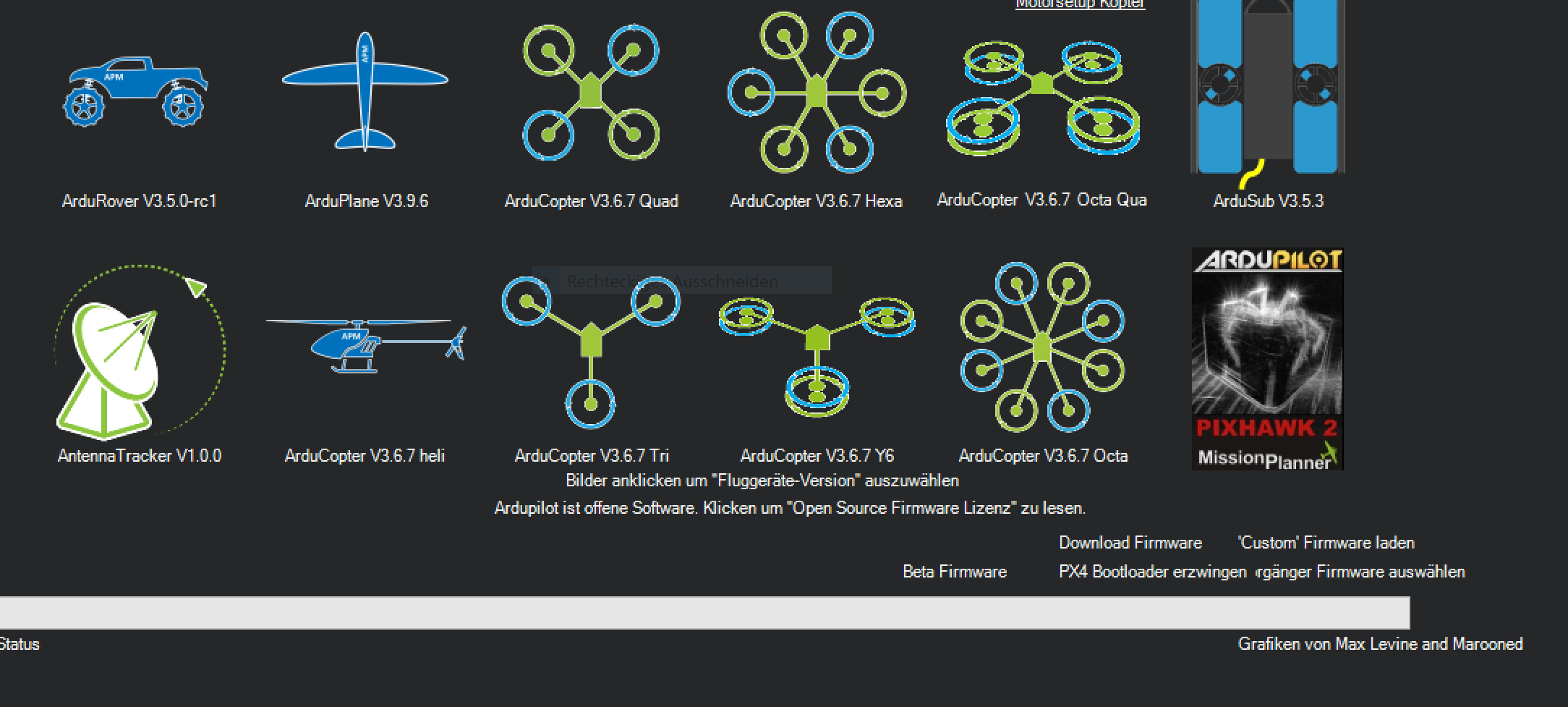
Check for beta updates button >> Mission planner updates to beta version >> Ardurover 3.5 now available under firmware!
Not sure what’s going on there! But I now have 3.5 so no worries
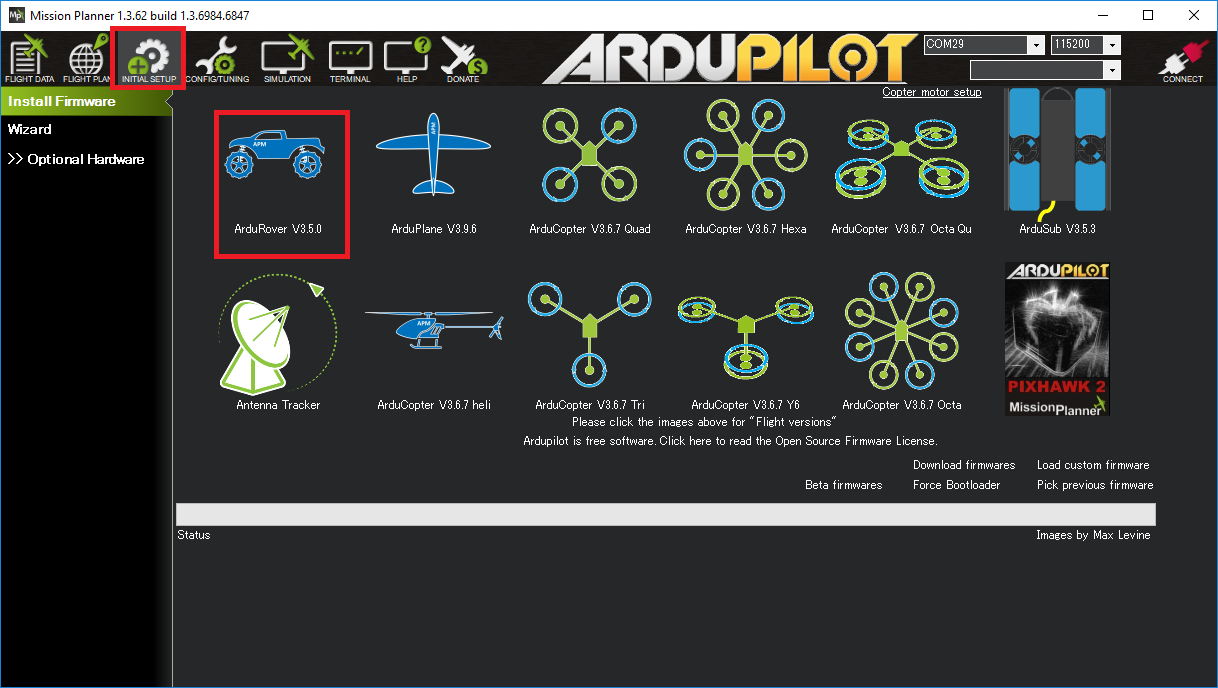
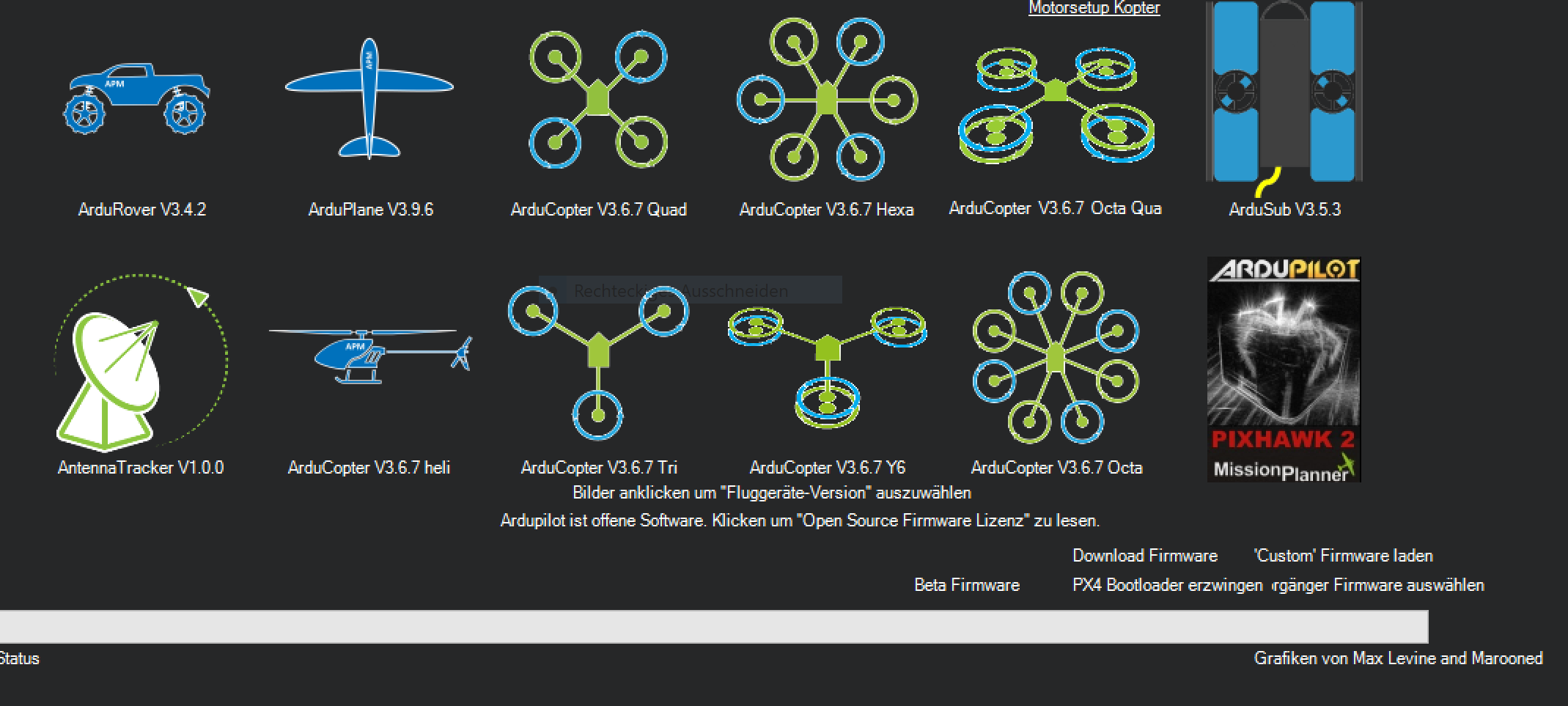
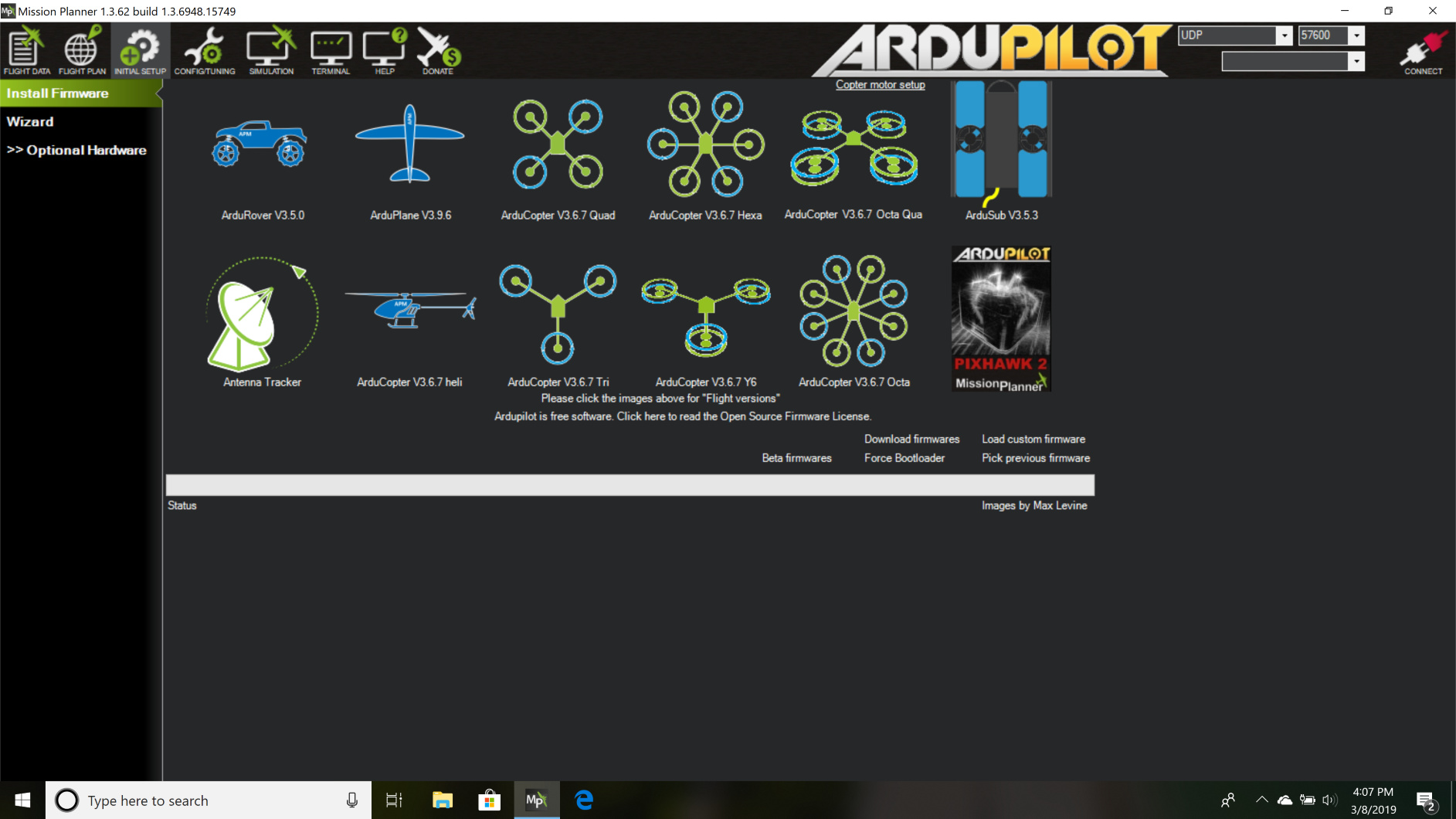
MichaelO’s gotten to the bottom of this issue with Rover-3.5 not being shown on MP’s Install Firmware screen. It was related to Rover-3.5.0 being the first release that didn’t support NuttX so it was showing the last NuttX version instead of the latest. It’s hopefully fixed now.
Hi I use the 3.5.0 firmware on a rover and I notice a problem on Pixhawk, the main signaling LEDs: Arm, disarm, GPS etc, do not light up at all. On the other firmware versions work properly only here give this problem the firmware is very nice and functional. How can I solve my problem?
@cristianmoi, it’s hard to say what the issue is but it could be a few things:
the eeprom is being cleared (this takes about 30 seconds) and the board will recover in a bit more time
the incorrect firmware has been loaded to the board (i.e. firmware for another board has been loaded)
the ground station is not correctly releasing/rebooting the board after the firmware is written (I don’t understand this problem properly but I’ve seen this a few times)
hello!
is it possible in new rover follow mode to follow base station position (for example tower in a phone) instead of another vehicle? or how can I follow someone walking?
@jcantilo, it’s at least theoretically possible if the GCS publishes it’s position to the vehicle. I’m not aware of any GCSs doing that though. Most GCSs implement follow-me by sending velocity requests to the vehicle while it’s in Guided mode. That should also work with Rover although I haven’t seen it demonstrated by anyone.
Want to say thanks for the Sprayer.I have been using separate rc switch till now, I will try PWM controlled.Its much needed when working on autonomous modes.