So at the moment at least, HOLD mode just turns off the motors and moves the steering to the middle. We don’t have a manual-ish flight mode that will hold position. You’ll find with a boat that if you use Guided mode to make the boat drive somewhere, once it gets there it will hold position, and in Auto mode it will do something similar after it reaches a waypoint (if you add a delay to make it wait there a while)… but we don’t have a manual mode in which you drive it around, and when you release the sticks, it fights against the water flow. Someone else has asked for that so I think we will add it in a future release. In fact, I have created an issue here to capture this request: https://github.com/ArduPilot/ardupilot/issues/7312
Thank you very much!
I’m familiarizing with documentation, I’m following wiki step to setup my boat now.
You are right, GUIDED is what I’m looking for.
I think that, for boat, position holding should be a mode, like Altitud Hold in a Quadrotor. I would like to drive in manual mode to some place and when be there switch to HOLD and let the control to fight against wind and water flow.
I finally could setup and config everithing.
But in manual mode, if I move my sticks, servo output goes from 0 to 500 and is centered on 250
It is something like maxbirley report.
I don’t know what “cycle the pixhawk” mean. ASV_01.param (11.1 KB)
What type of board are you using? Maybe attach a picture of it or a link to where you got it from.
I’ve personally never seen this error message before, it’s possible it’s an SD card issue (that’s a wild guess) or perhaps the I/O CPU’s firmware needs to be force-loaded (attach a safety switch and hold it down as the board boots).
Restricted Throttle Output - (Ground Rover 3.2)
Here is a problem I have not run into before, probably going to slap myself on the head later, but here goes …
Problem - Restricted movement of throttle
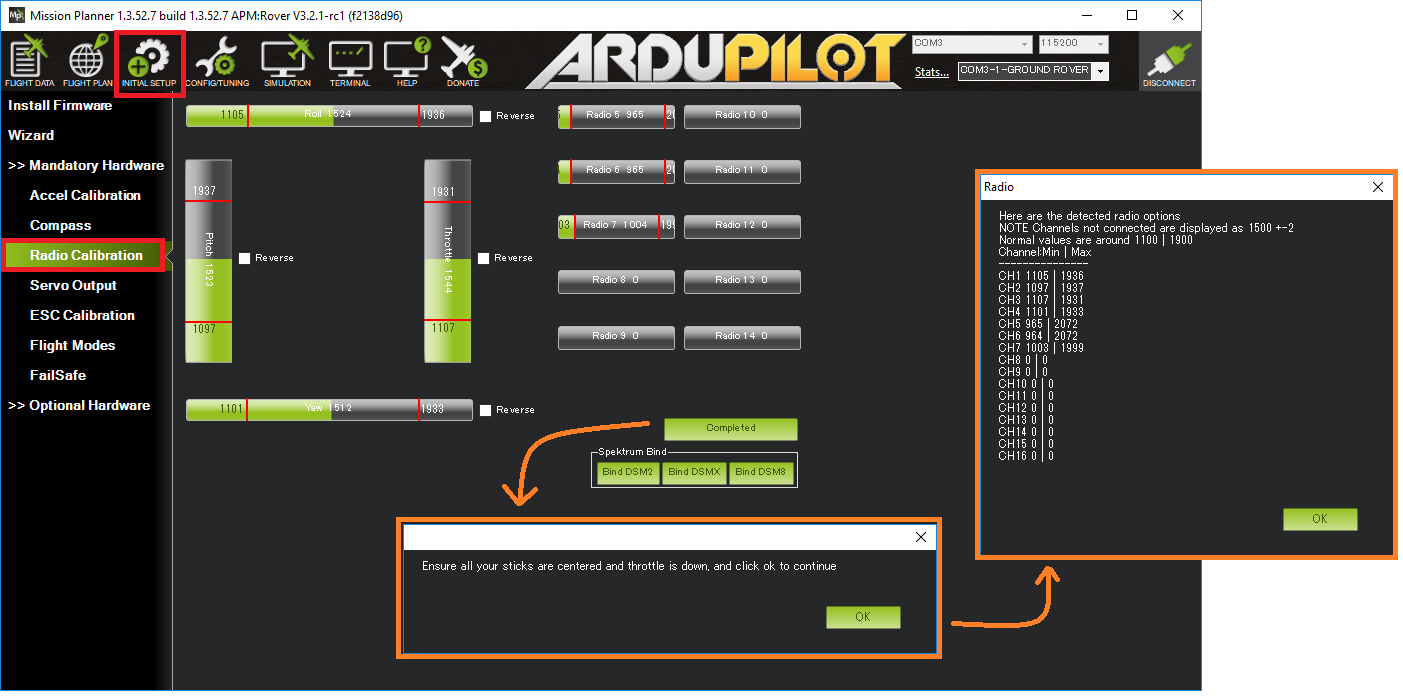
Photo 1 shows calibration values
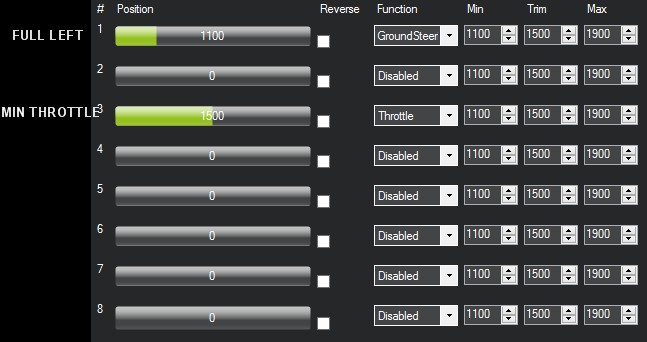
Photo 2 shows full left steer and min throttle
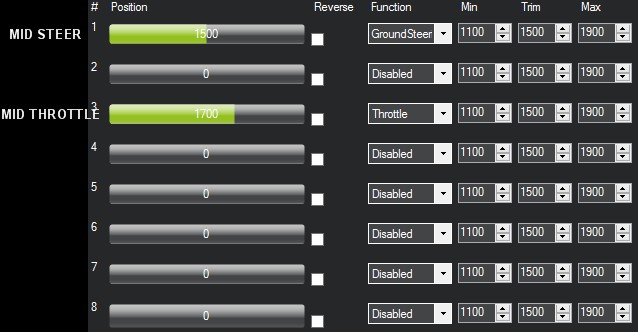
Photo 3 shows midships steer and mid throttle
Photo 4 shows full right steer and max throttle
Question -
Why is the min throttle so high?
Thanking you in advance