In this sir what level of battery is advisable for 5000mah battery. My ESC is 30A.

Hi Experts, i tried flying today but the copter theres something wrong its not flying up. Do i need to calibrate the compass from time to time?
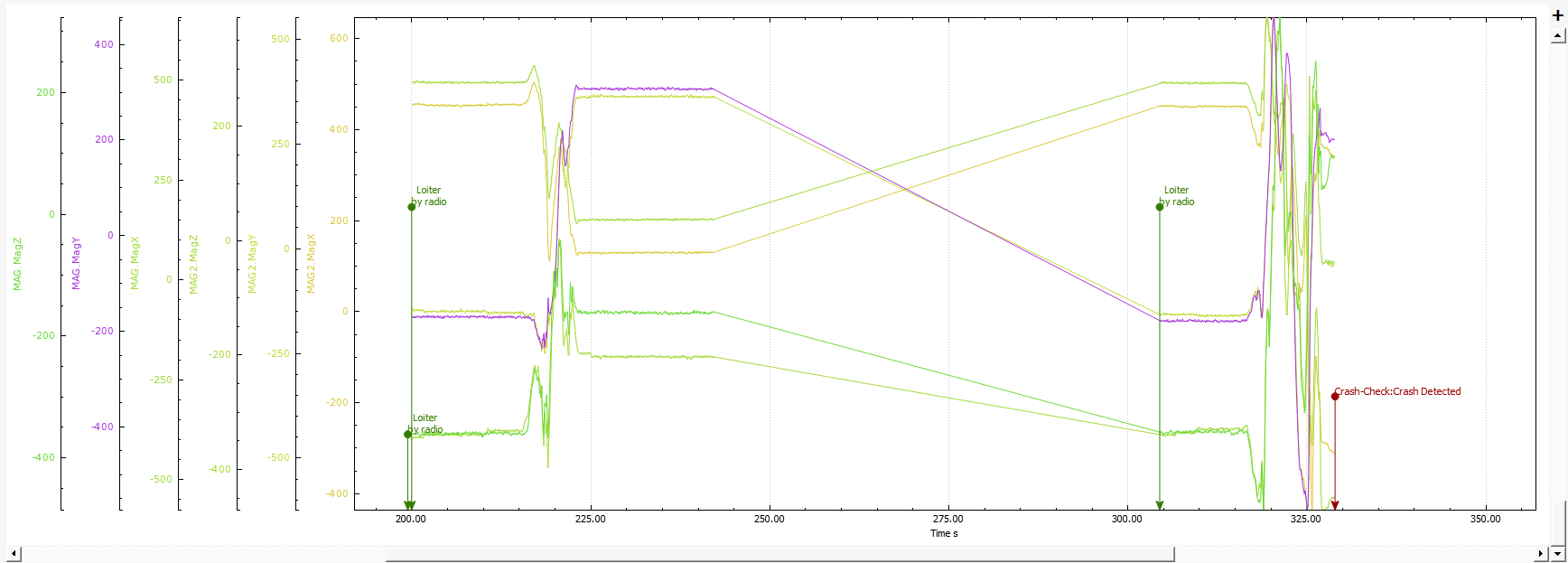
Here a small log, didnt fly and crashes a little bit:
with a 5000mah battery i was decided to land at 3.6 per cell so my low battery setting was 10.8 volt
no you dont need to calibrate the compass from time to time
but its better to re-calibrate your compass after a crash
at the moment now you need re-calibrate your compass
there is a very large change in your mag
and a question does your motors start sniping together after motor arm ?
Hi Sir, yes its started spinning together after armed.
You mean I will put 10.8V into Low Battery option? When the battery level reaches 10.8 it will automatically land? How about the mah sir?
i was set 10.8v for Low Battery option and always i left reserved MAH empty because battery capacity is changing during its life and its better set LAND for battery failsafe
also after compass re-calibration do an ESC calibration
The mag field is changing because the craft is yawing (spinning around). The mag field change is the effect not the cause.
The only time you need to re-calibrate the compass is if you make a harware change on the craft that effect the mag field. Adding or re-locating hardware. I agree with Hosein that’s it’s a good idea to do after a crash also.
I would suggest you take-off in Stabilize mode not Loiter. Get to a Hover a few meters up then switch to Loiter. Arming in Loiter is fine because it checks the GPS quality but then switch to Stabilize. This might be why you say “it’s not flying up” if you don’t understand how Loiter works relative to throttle.
Hi Sir, thanks for your reply. RTL wont work for Battery Failsafe? Because I wanted it if possible to return to launch for battery failsafe.
Yes sir, i will re calibrate compass and ESC in mission planner.
Ill give update later. Thank you.
Good morning Experts! I did try AltHold today before Loiter GPS, and I notice something wrong in my copter it is unstable and moving fast. Do I need to auto tune again? My Drone was okay few days ago  But now i dont know whats happening.
But now i dont know whats happening.
Note: I recalibrate compass and ESC without memory card insert on the FC. I think it wont matter right.
Heres the log:
AltHold will only hold altitude. It will drift with the wind, you need to control the craft manually. There is nothing of value in this log other than the fact you have poor GPS reception during the flight.
I have some advice for you. Fly this craft in Stabilize mode until you have developed good flying skills. Many batteries. Then when you have developed some skill post something meaningful.
In stabilize mode it will take off in 1 percent of throttle? Unlike AltHold and Loiter that will take off above 50%? Because i never tried Stabilize.
Also, my GPS has Lock already but my FC wont change the color of the LED which means it has GPS lock already and ready for arming. I saw that it has lock through QGroundControl.
I would like you to arm & disarm, let your GPS sit in a wide open area for at least 3 minutes then fly a 5 minute flight. Your GPS issue is not fixed.
Yes @mtnsurveyor, already change it to 67 the GPS_GNSS. I stayed outside probably 1 minutes in loiter to wait for the FC to change color because it has already GPS lock and getting 9 satellites. But still cannot arm since the FC LED color wont chage to GREEN, which means ready for arming with GPS lock.
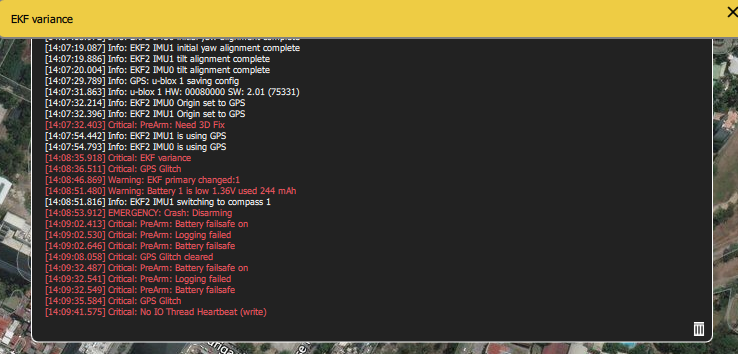
Also in QGrouncControl it has an error says “Compass Variance”
Its getting worse in Loiter mode i didnt even take off it crashes, loiter mode was okay before i even got to fly 5 meters up. But today i just dont understand what the problem is: This was okay before. I dont know if its the motor or what.
Is there a possibility that this is cause of damage ESC?
dear @banjing
as @dkemxr said there is noting in your log, just poor gps reception
lets ask and try something
1-why you are removing SD card from FC ?
2-try both compass re-calibrate with inserted SD card and NEVER remove this
3-if you want to try fly with loiter for test flight go in a wide aria and test it to find out what is the main problem ,near big buildings and trees you will have GPS problem
4- if you dont know how to fly with stabilize see this video
5-your copter blinking yellow because minimum satellite count for loiter is 6
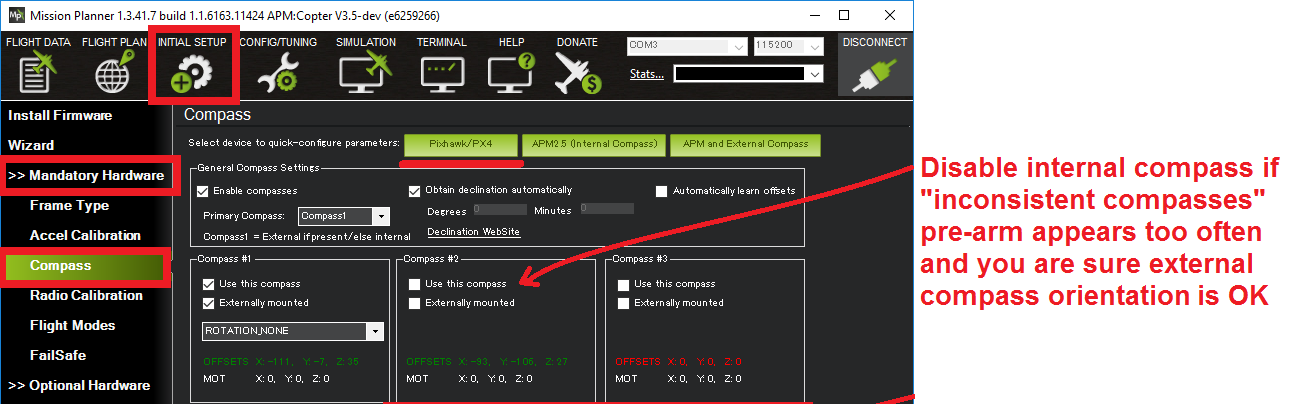
6- set your external compass as primary
2 Likes
Hi @hosein_gh, i am removing the SD Card because im copying the logs in my computer. Is it possible that my card has been damaged?
I tried re-calibrating the compass and ESC set Compass 1 as primary using external compass, and Compass 2 is click check.
Fly AltHold a while ago to try, but im having problem with the radio, suddenly the disarming is not working “when i pushed the throttle to the lower left corner” it didnt disarmed, the copter is on the ground landed it just spinned super fast. So i did emergency disarmed using QGroundControl. I dont know if the problem is on my radio.
My copter dear @hosein_gh was okay it flies already you know that, the only thing im trying to fixed is the battery failsafe and the GPS but i think it gotten worse, it was like im starting from the beginning again I cannot move on huhuhuhuhu.
if SD card is read able by PC dont worry its ok
next time try to download log by mission planner from your FC for more info look at this link
as i suggested before try to disable internal compass if you get Compass Variance or Inconsistent compass
for this try radio calibration again
http://ardupilot.org/copter/docs/common-radio-control-calibration.html
also what is the value of MOT_SPIN_ARM in parameters list ?
I will check the value of this tomorrow Sir @hosein_gh, i didnt change this one for sure default. The only parameters i changed was the GPS_GNSS, is there any parameters that I need to define Sir? My drone was became problematic, i though im improving but it seems like Im beginning from the start again.
Im so scared to fly on loiter now because the last time i did a while ago, the crash was terrible, i change all the propellers it was damage horribly. it didnt even take off on 10sats it just drift away and scattered. ![]()
Okay Sir @hosein_gh I will disable the Compass 2 by unchecking it. Do you think my GPS is damage? Or ESC? or motor?