Hi experts needting your assistance on this please, I tried the battery failsafe to test that if the drone will shift to RTL once the battery threshold level is reach. I dont know whats wrong with my drone, it doesnt Return to Launch
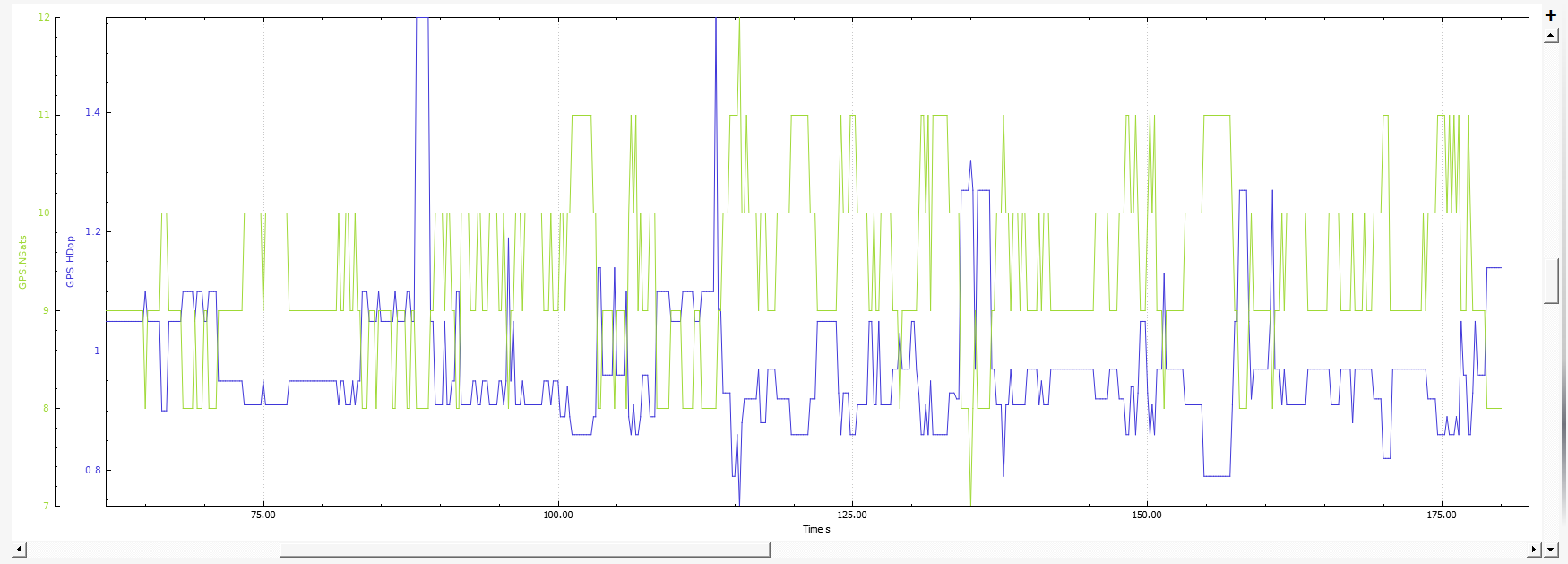
it because of that your GPS HDOP is higher than 1 at most of the time you have to wait more to get more satellites
you should have at the least 12 satellite count for a mission fight
Your expectations are too high. It will rarely land in the exact spot even with good reception with standard M8N modules.And next time you report a problem like this give a more detailed explanation. “It doesn’t return to Launch” is ambiguous.
Hi @dkemxr thanks for your response, yes im not expecting it to land on exact location. My concern is that, when changing to RTL it lands on a bit far from the location where it takes off at least 6-10 meters. I guess is supposedly should land at least near on the location where it takes off.
So what do you suggest ill do? Change to what kind of gps?
6-10 meters is too much. Max should be under 2 meters if you start with a good fix on the m8n.
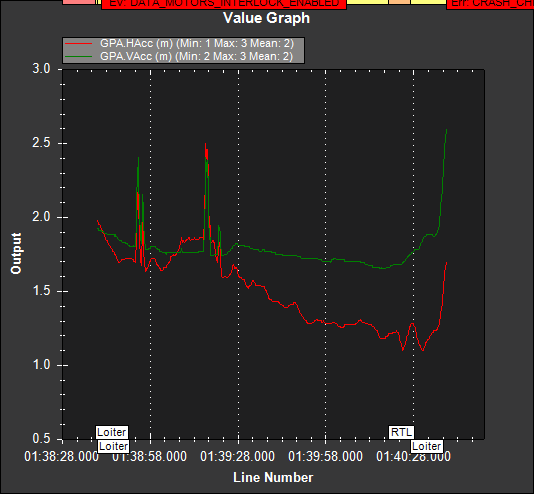
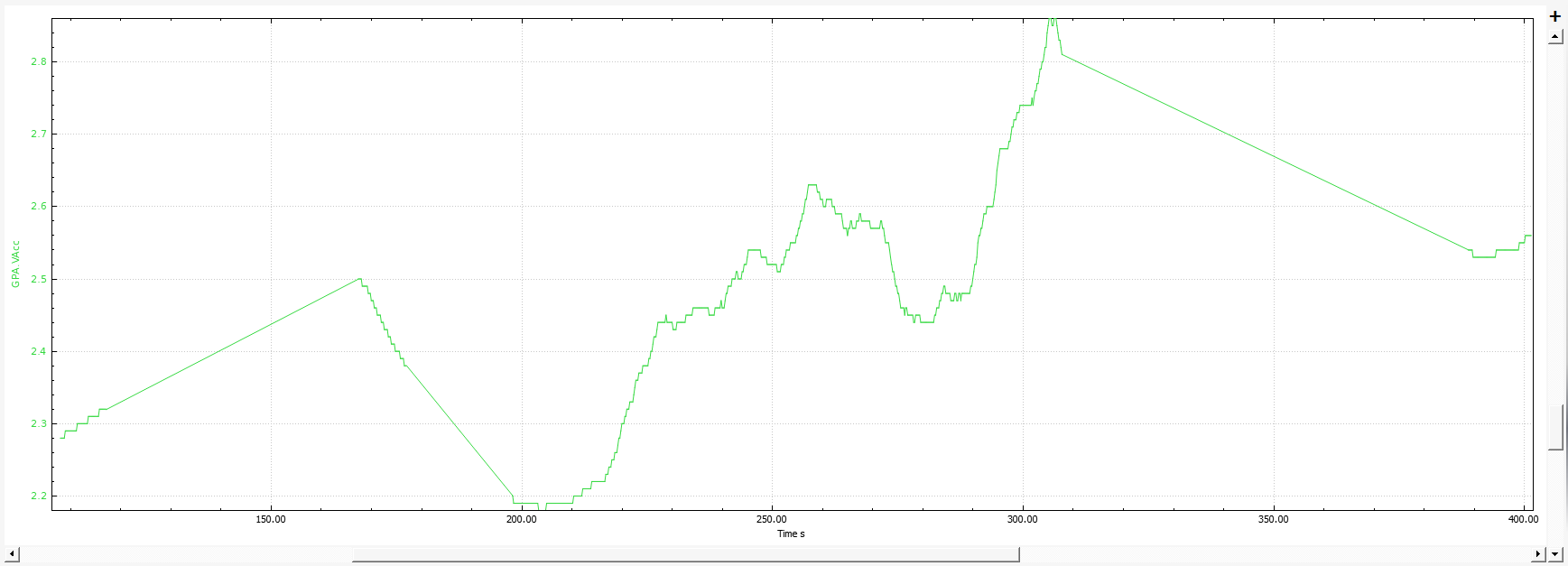
The m8p & f9p will do much better when running RTK in float or fixed mode. However looking at your log, your m8n GPS is not performing as well as mine.
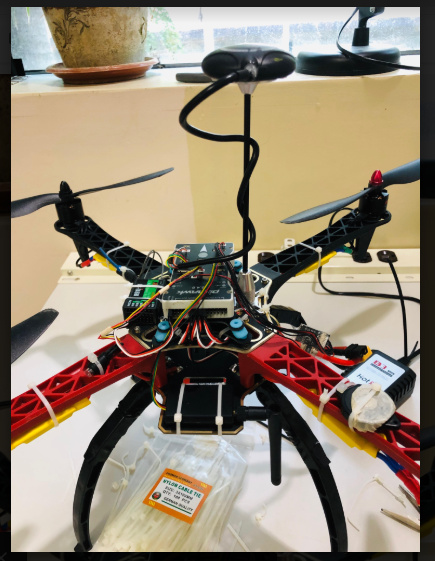
I suspect your GPS mount and RF interference is degrading your results.
Please post a photo of your Copter & GPS.
HACC & VACC should be well under a meter.
This is what I thought.
Place the GS radio below the copter, Orient the GS antenna downward 15deg off vertical.
Raise the GPS a inch or 2. Guarantee you get better results.
Yes Curt is right. Another good place for the telemetry radio on those frames is off the lower plate in the back. In fact you could locate several things on the lower plate. The only thing I had on the top plate of an F450 frame was the FC and the GPS module.I would get rid of the cage too it’s not helping any. For sure it will add some offset to the compass.
Hi Experts, needing your assistance please, I tried Loiter to RTL today as you suggested to remove the cage and adjust upper the GPS but it seems im having still a problem:
Please help me read the logs above. The problem is, it says Warning: EFK2 IMU1 ground Mag Anomaly Yawre- alignment on QGrounControl But this drone already done AutoTuning Yaw, Pitch and Roll. The only changes I made is i removed the Cage, put the Telemetry below copter and Used a stand for the GPS.
And Still, didnt return at the nearest home when RTL. Also, Upon opening the Misison Maker App, the “H” is far away where the Drone is supposedly located. Satellites is 12.
location of all your parts now is fine
just i think something is coupling vibration to your fight controller because your z vibration is increased too much from last (its not the reason of GPS accuracy just an advice for a better fight)
Right, ignore that EKF message. Did you re-calibrate the compass’s after re-mounting the module and removing the cage? It’s required. Yaw actual vs yaw desired shows some yaw instability.
No idea about Mission Maker, is that even supported any longer? I use QGC on Android and IOS.