I am using arducopter version copter-4.0.2 on a quadcopter. I am using matek f405 ctr flight controller. I am flying and controlling quadcopter using a self made GUI(GCS) which sends mavlink commands to a companion computer mounted and attached to quadcopter. I am using RTK HERE+ GPS.
I have fly this quadcopter many times before and it was flying very well without any issues. But today i have to terminate the flight mid-air cause quadcopter went out of control and it kept increasing its height maintaining the same position.
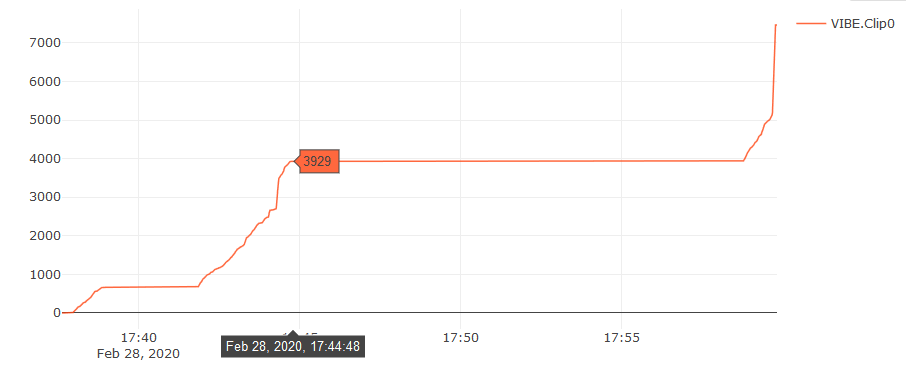
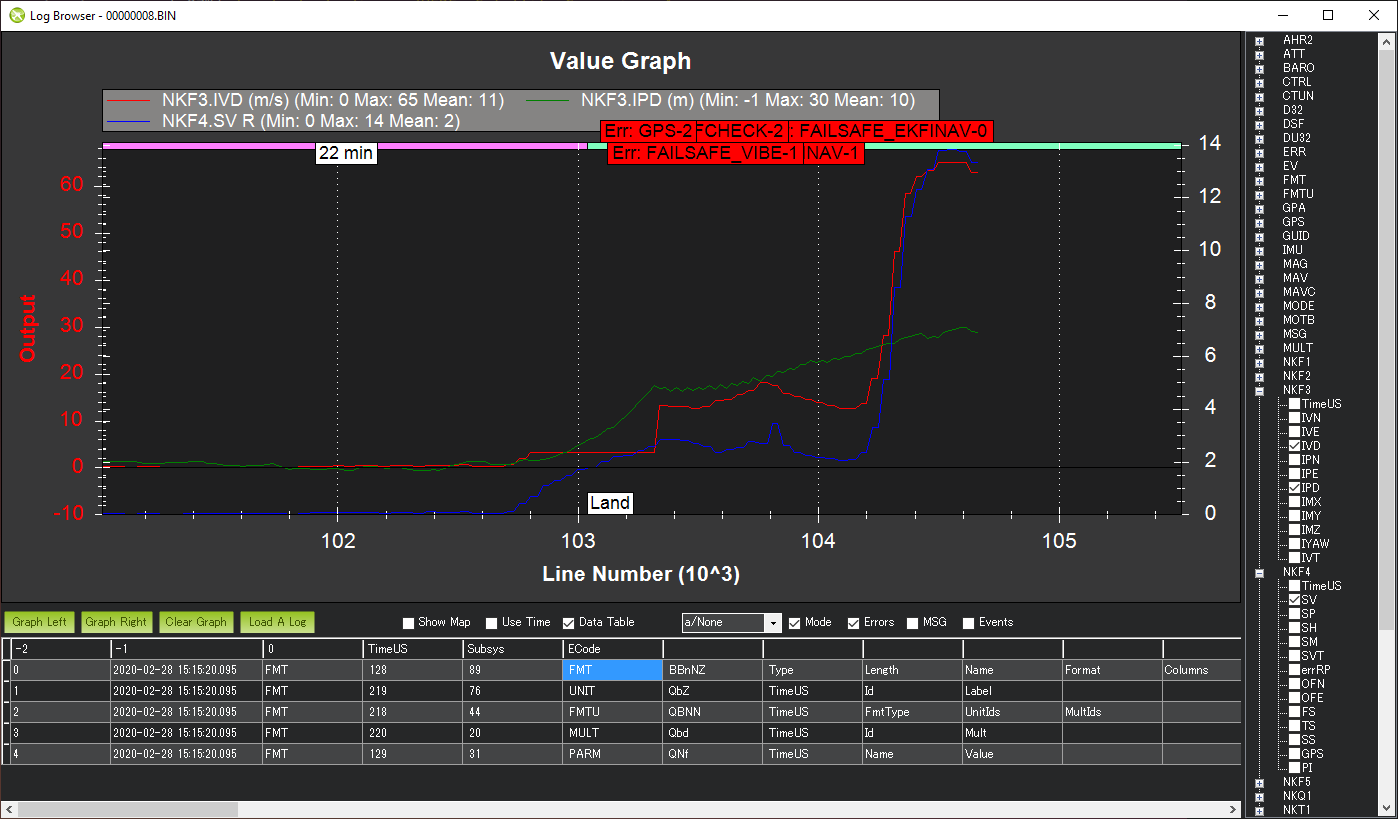
When i checked the logs, i found there was gps glitch,followed with ekfcheck-2 error and some error mentioned as err:29-1 which i am not familiar about and never seen anywhere before in any ardupilot documentation.
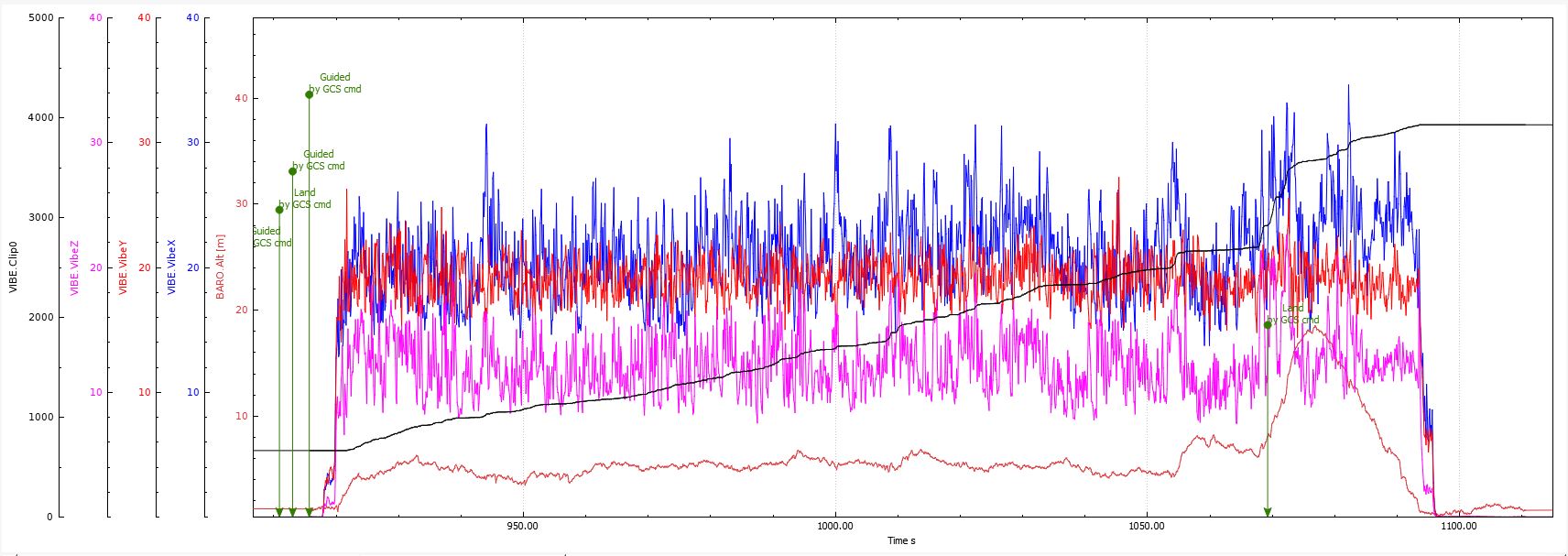
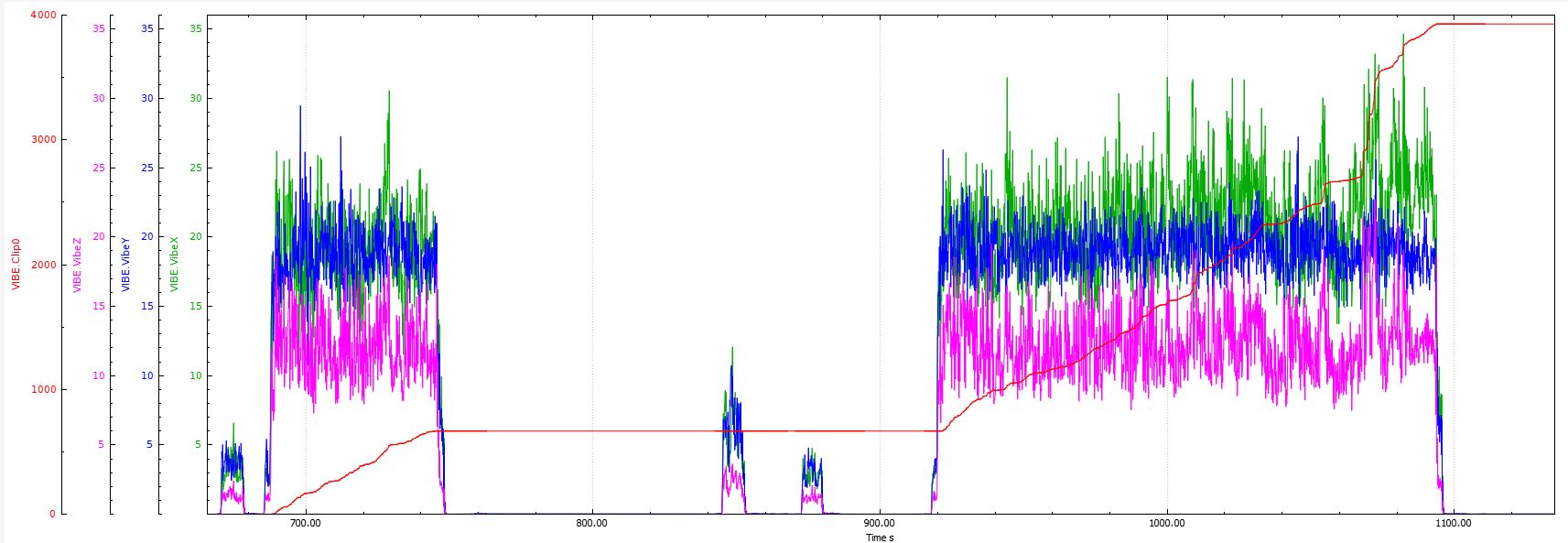
When i review the log, I checked BARO.alt,GPS.alt and POS.alt, i am not able to understand why there was a gps glitch in the first place. i also checked NKF4.sv and that was also out of the acceptable range during my quadcopter went out of control. I think there was some issue from both gps and barometer end.
Another thing is that there is no log of POW.vcc, i ensured flight controller getting right power from the input end but i am not able to ensure that during flight from logs, i doubt if gps getting sufficient power or not, and that might be causing gps glitch.
I am attaching my quadcopter fly away flight log here, where there is record of 2 flights in the same log, i have seen slight misbehavior in the first flight too but quadcopter fly away in the second flight and quadcopter went out of control, after that i terminated the flight using mavlink command and quadcopter crashed badly.
Can anyone please help me figuring out why these things happened and what was the main cause of fly away, whether the reason for fly away was avoidable or not.