Hi Nitin,
It looks like your IMU is dead. The barometer and rangefinder altitude measurements consistent with each other. While hovering in STABILIZE mode, IMU Z-axis accelerometer measurements are kinematically inconsistent with respect to the throttle output and barometer-rangefinder height measurement.
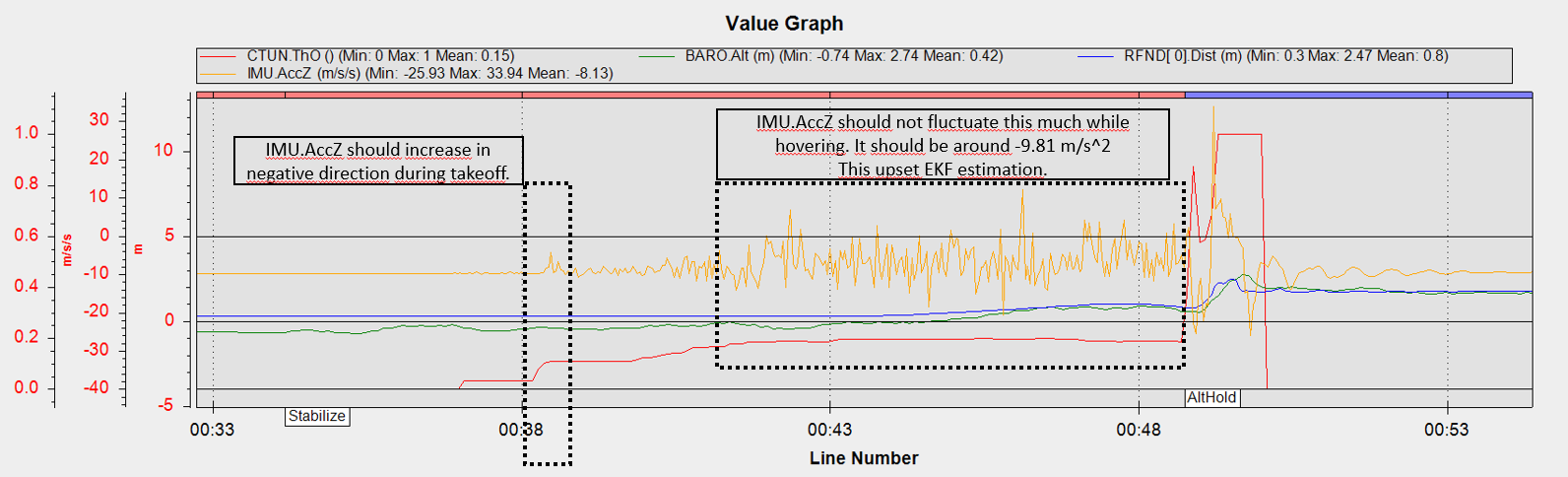
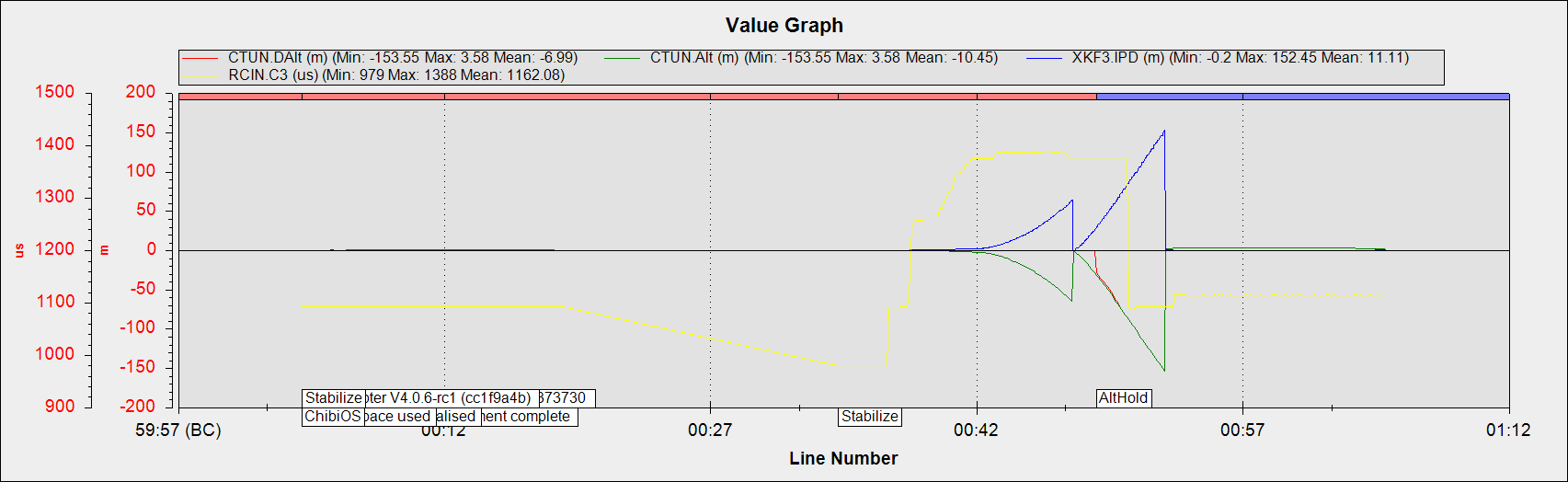
Desired altitude supposed to be the vehicle’s current altitude the moment you switch to ALTHOLD. So, It is expected for the desired altitude to jump to the -29 meter for this case. EKF clear out wrong altitude estimation while hovering, but it didn’t really help.
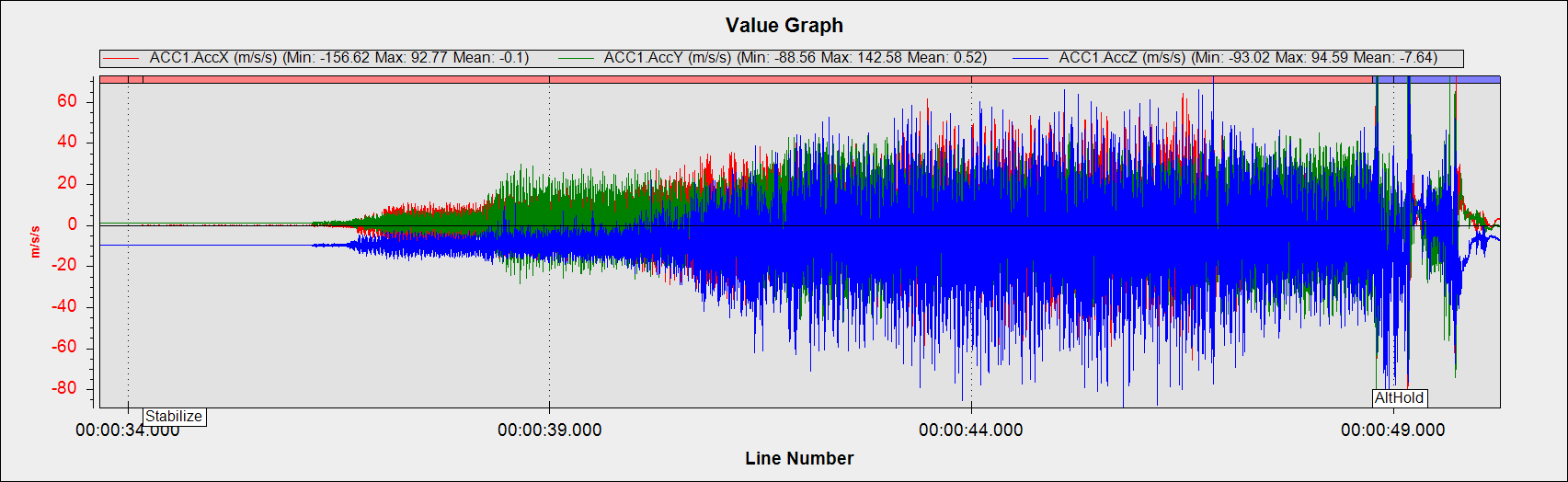
Raw IMU measurement logging is enabled. This shows that there is too much noise in Accelorementer.
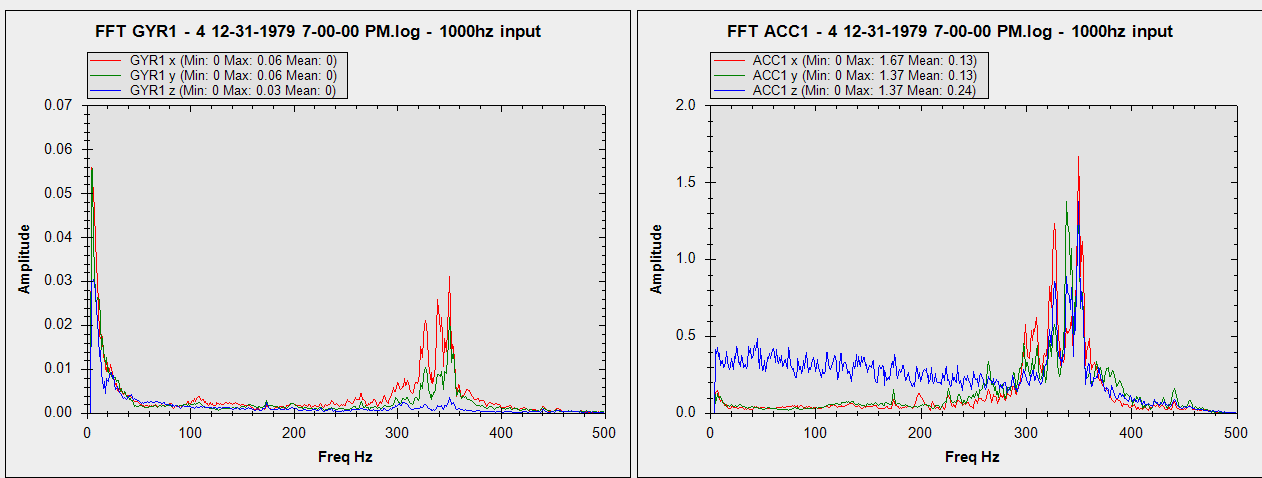
I suggest you to not perform any flight that requires altitude estimation. Perform further flight in STABILIZE mode and check the log for altitude estimation innovation. If you had an accident with this frame, I first suggest you change the motors to see if the vibration is reduced. If this does not help you might have to replace the flight controller.
I also suggest you take look at the following forum post with a similar problem.