So i flied it with pos hold for some time and here is the log.
Also i want to know why you are saying that vibe is too much, what is in acceptable range and what does the clipping do if it raise to abnormal values?
here is the log
Reference information on vibration here:
https://ardupilot.org/copter/docs/common-measuring-vibration.html
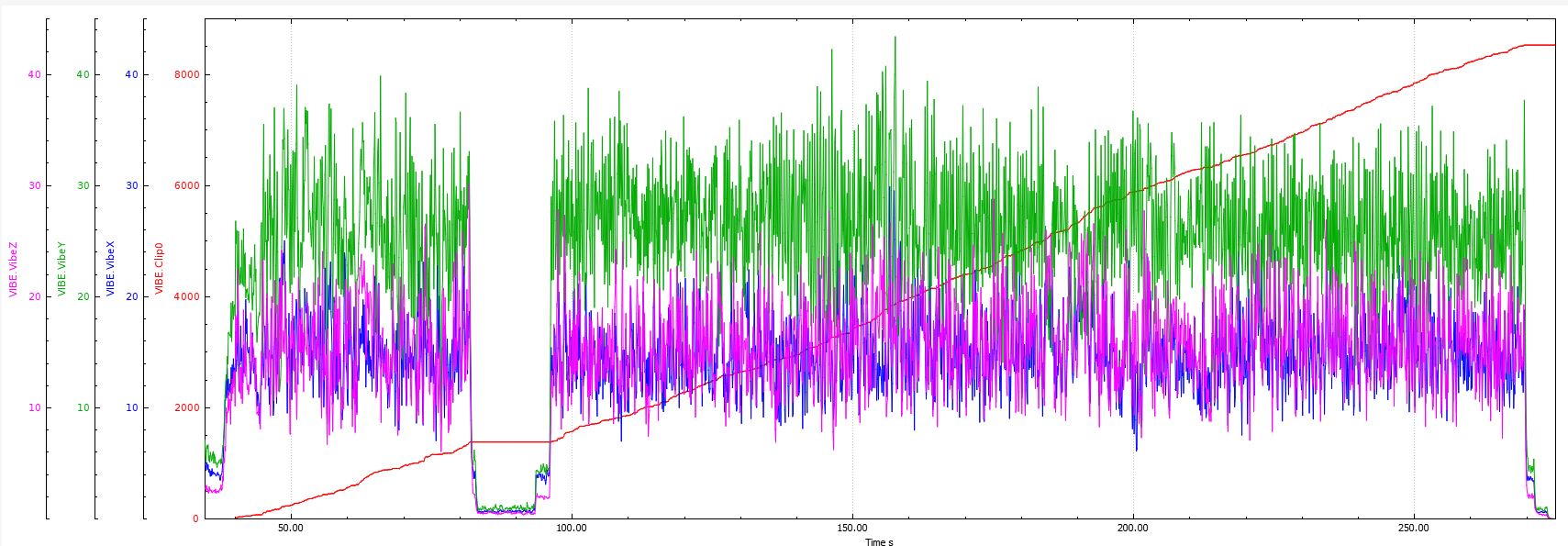
As seen in your previous flight vibration levels are high and clipping is occurring.
1 Like
i can see that vibration is not good but only y component is higher in vibe and rest of the other are in acceptable range as mentioned on ardupilot i.e. 30m/s/s. So why is clipping occuring and let’s suppose that may be due to this bad Vibe. so what does the clipping do what is meant by this i searched many times in google about clipping but no good docs can you please help me by sharing something related to it and yes i am working something for the mechnical vibe and i checked that all my propellers are well balanced upto the point and motors also still a bit confusing where this vibrations are adding on from
See Mr. Riseborough’s explanation in the post above. Clipping occurs when an event exceeds the full scale measurement range of the sensor. How is your your Flight Controller mounted? What type of frame is this?
yeah that thing i know when accel. crosses its max value 16g but i don’t think that’s the case here my flight controller is matekf405 std mounted with it vibe dampers , It’s a quad x frame made up of carbon fiber
Can you show a picture of the vibration isolation on the vehicle?
Sorry to harp on but vibration isolation is really important especially with flight controllers that don’t have it built in. Here is our wiki page with suggested methods.
The increasing clipping numbers mean that the IMUs are going past their limits. I.e. over 16G.

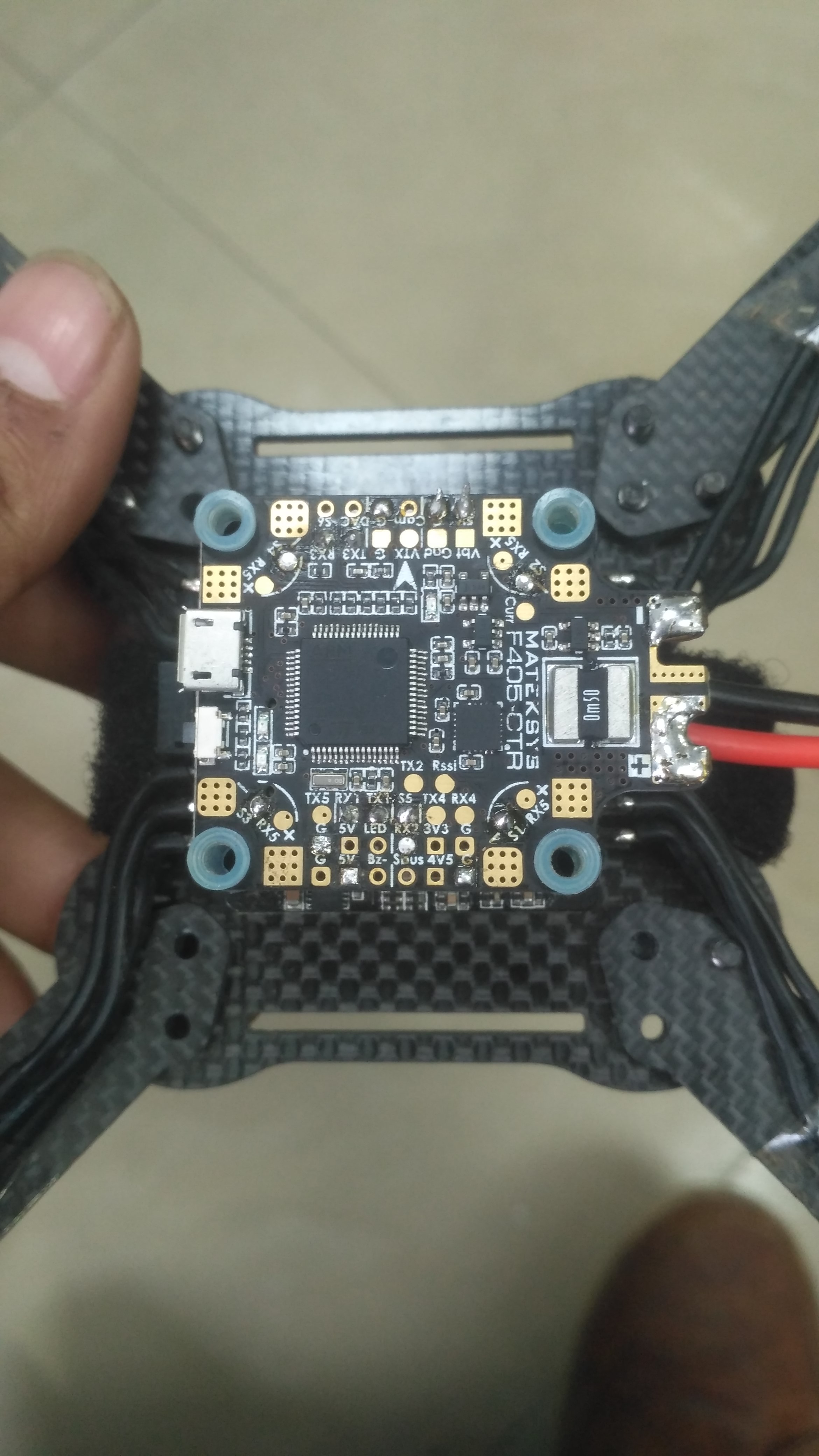
That’s a F405-CTR which does have current sensors. You can also add current sensing to a F405-STD, it has a pad to connect a sensor, or you can combine it with their $8 FSHUB-6S PDB which adds it.
I have recently set this because on previous crash the std board break in half and anyway current and voltages are not my issue for now
My guess is the frame lacks rigidity and those blue grommets offer insufficient isolation. I suggest the frame because your X and Y axis vibes are high relative to Z. Usually we are battling high Z-vibes.
1 Like
Well, in that case , a picture worth a thousand words… Stop digging in logs for cause analysis, it is quite obvious that this setup is inappropriate.
You need to go back to square one, and please read, read and read again the wiki as all the answers are there:
1 Like
It also looks like you haven’t followed the basic tuning guidelines which is particularly import for small multirotors.
https://ardupilot.org/copter/docs/tuning-process-instructions.html
You would have arrived at this by following Mr. Poirier’s link…
just wait i have a ton of reports for today i will update everyone in a moment and second thing
it’s not the only small quad i have i have other quad’s as well and they are doing quite well neither we are newbie actually what i want everyone to notice is the new firmware updates i am flying this quad amazingly well with 4.0.2 but as soon as 4.0.3 comes everything become worst.
I will put up everything in a moment
so first of all i would like to say you are a little bit wrong here, Logs are the only reason we can dig deep into errors cause physically my drone is not even vibrating a little bit this much vibration are seen from the logs only. Secondly please everyone check out these new logs. I tried my best possible methods to reduce the vibrations and can able to get vibration reduced to very much extent yet clipping is sky rocketing and before commenting on vibration again please note that on ardupilot main websites which you all are sharing says that vibrations under 30m/s/s are acceptable so if my vibrations are under that and yet you all are saying that it bad what does that leads too is that website wrong? Third and the most important thing is that i have a quad with too much vibrations, logs of which i am sharing what i want you all to focus in it is that even at that much vibration clipping only has a value of 1 what is that are those vibrations are minimum. Please look deep into the matter i have already read a dozen of websites tons of patches and nothing helping me that’s the only reason i am here we designed a number of quads tunned them in the best ways not a beginner and thoroughly test new ardupilot version and on same drone with 4.0.2 works good but now as 4.0.3 is flashed it’s misbehaving way too much
Link for the log of 4.0.3 firmware: https://drive.google.com/file/d/10zs7fpZGYRuiTcZuyOPNNcd4MXwjiB3K/view?usp=drivesdk
Link for the log on 3.6 firmware:https://drive.google.com/open?id=1SNwdRCCAk5qdPU9j-QQTkH7Ipo56WVD-
I think Patrick’s point was not that logs are not useful in a general sense, but that the picture makes the issue clear.
The 30m/s/s level is a guideline but in any case it appears the vibration levels in the logs show that it is very close or above 30m/s/s. I think what may also be special about this case is that the vibration is high in multiple axis while normally we see quite low X and Y vibration compared to Z-axis.
I’d be a surprised if going back to Copter-4.0.2 resolved the issue because I don’t see any changes that should affect this (code is here, release notes are here) but you’re very welcome to try and see if it helps. I’d recommend back-to-back tests with the two versions of the firmware.
Older versions of the firmware can be installed using MP’s Firmware Install page’s “Pick previous firmware” link on the bottom right or the firmware can be directly downloaded from firmware.ardupilot.org/Copter/stable-4.0.2/MatekF405-STD (use the ardupilot.apj file)
TBH, I don’t think we need to argue. Above are the analysis and opinions of some of the most experience ArduPilot devs and pro users and we all want your vehicle to fly well using AP.
Thanks again for the report, and very sorry about not retracting my advice to turn off the vibration failsafe. It was the first time I’d seen the vibration failsafe trigger on a real vehicle.
P.S. one of the links above required access so I couldn’t look at it.
1 Like
No sir don’t say sorry. I just want to be sure isn’t that a firmware fault i will surely test with 4.0.2 back again but in the mean time i shared logs with 3.6. and having higher vibration than that of the latest builds and you can see the cliping happens only once and now in the latest quad did you check the vibe. i reduced it too a very larger extent and yet the problem persist i can’t able to understand the reason of clipping being skyrocketing that much even with low vibration and no clipping in 3.6. even with high vibration and yes we surely gonna do some work on EKF if needed in code i am also extensively testing the latest build.
1 Like
And sorry for the link which required access although i approved you yet i updated the link and you can check now there will be no access required
I definitely agree that the vibration levels are much lower in the Copter-3.6.4 log. The log is a couple of months old though and it’s not the same flight controller (it’s a Pixhawk) so it could even be on a different frame.
If you could do back-to-back tests on the same vehicle with Copter-3.6.x and 4.0.3 and post some logs we can compare the vibration levels. They should be the same but if they’re not then that would likely mean a software bug or some kind of configuration difference that we should investigate.
P.S. it was the 4.0.3 log that I couldn’t access but I’ve got it now, thanks!
Yes that 3.6. has pixhawk on it. And yes i want to test the older version on matek std but i am not sure when i flash that firmware baro behaves strangely rising over to 5-6m even at ground. I don’t know why this happens are bmp280 on board baro supported on 3.6?. Also the one with pixhawk has more vibration yet no clipping as compared to matek with 4.0.3 that’s the thing which annoys me that’s all i need to solve this before going on to any further steps yet i will do test again on 4.0.2 until you confirm 3.6 supports on board bmp280 baro
I suspect the baro climbing to 5+ meters is caused by the board heating up. If it stabilizes then I think it’s probably OK. Copter-3.6 does have a BMP280 driver.
If we’re testing the Copter-3.6 on the same frame that’s had climb-aways it’s really import that you’re able to retake control in stabilize mode because Copter-3.6 doesn’t include the vibration failsafe.