@tridge Yep, here is a tlog which shows the basic behavior, but not the effect of writing the parameters because that was done over several other tlog sessions.
https://drive.google.com/file/d/1WJYm4p5WogVHqukT2uV5OdtYjJxcKw6u/view?usp=sharing
@tridge Here’s a second tlog which shows how writing the parameters can effect the behavior.
https://drive.google.com/file/d/1nLrCgPn_xCNmLbXt5Ii2Ge0cE51jj4gb/view?usp=sharing
I have build a mini skywalker with F405 WING installed(latest stable firmware),it fly very stable in FBWA and AUTO mode ,But it will be death spiral when in cruise mode.I have test several times ,it come to death spiral as soon as i change to cruise mode .
the min airspeed is 13m/s,that speed did not cause stall when in FBWA mode.
I check the log file,But there is no impossible situation, trouble you to help me to see what reason. @tridge log file:
https://drive.google.com/file/d/1OwKu0hMaSpyeI-w4tviZt-Lclv3NhVju/view?usp=sharing
Looks like it’s doing exactly what RCIN channels 1,2 (roll/pitch) are demanding…
How are you changing flight modes? The flight mode channel is set to 15, (FLTMODE_CH, 15) but I can’t find that channel in the logs. When the plane was in cruise mode at some point RC10 was triggered to high, re-reading the mode switch (RC10_OPTION, 96). It was after this the plane went into manual mode and based on the control inputs it began to roll. As was already stated, the plane did what it was told to do.
can someone please provide a solution for Battery failsafe engaging on Qland.

I’ve just released plane stable 4.1.6. This is a minor release with some important bug fixes:
- disable the STLink debug pins after boot by default to prevent ESD from triggering CPU changes or a reset
- support ICM-20608-D, IIM-42652 and ICM-40605 sensors
- fixed missing covarience reset row in EKF3
- fixed failure to detect inverted RC input on uarts when transmitter is on at boot
- fixed QAUTOTUNE to obey maximum attitude rate limits
- fixed a bug in smartaudio support that increased CPU usage
- added lowpass filter to speed scaling to prevent sudden surface movement on VTOL arming
- fixed hang when BATT_MONITOR is set to 14
- fixed gaps in EKF3 logging of variances and timing
Happy flying!
4 Likes
Have you got ekf switching messages? Do you use compass now?
@tridge Thank you for the great work. Continuous improvement makes our Ardupilot becomes better and better.
@tridge My request is not about the latest FW version, but the whole day I am trying to put the Neopixel strip WS2812B into operation on my F765WSE (with 4.1.6), still unsuccessfully. The LED strip is connected to S10, the script LED_roll.lua is placed on SD/APM/scripts. Please, can you check the params, if all has been set right?Parameters_Neopixel_Roll.param (20.2 KB)
Hello Tridge, your help would be for me as a simple user very supportive, as I cannot move forward with this issue. I set params SCR_ENABLE=1, SCR_HEAP_SIZE=100k, BRD_PWM_COUNT=9, NTF_LED_TYPES=455, SERVO10_FUNCTION=94, but I have still nothing on the S10 output. Please, can you advice what I omitted, or what should I do as a next step? According to the messages in MP it seems the script has not been running. 
Hello Tridge, I will answer for myself. It would be enough for me to write that it only works with the latest version 4.2.0. This my issue may be too trivial for you, but…
@tridge currently in ardupilot v4.1.6 the RPM2_TYPE command appears with option 5:ESC Telemetry Motors Bitmask, but the RPM2_ESC_MASK command does not exist.
Is there a way to use it in v4.1.6?
Can we expect it to appear in the future v4.2.0?
Hi tridge,
tried AP 4.1.6 in Mission planner SITL with Realflight Griffin model and testing different RTL and QRTL modes.
i have some of doubts and clarification need on this because when we do it in real time I’m very afraid with out clarification on this.
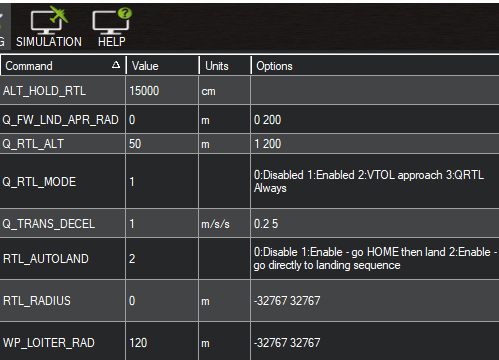
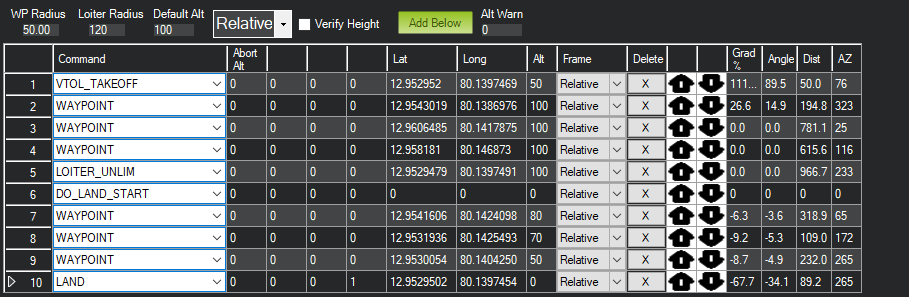
I have made land route as mentioned in the waypoint after the DO_LAND_START and Q_RTL_MODE =1
RTL_AUTOLAND = 2
As of my current waypoint No 5 has Loiter Unlimited over home point(Landing point).
when i gave RTL command it doesn’t follow the DO_LAND_START landing sequence instead its straight away QRTL to the land point.
As of setting RTL_AUTOLAND = 2 it should follow the Land sequence after the DO_LAND_START.
but it happen only when long distance .if aircraft far from landing sequence that time if i gave RTL it follow the landing sequence.
I want to one more thing that aircraft always flying in excess radius(Loiter) than i set it in SITL.
Example : if my loiter Radius is set to 200m means its always fly 220m in all radius depend modes.
My ArduPlane version is V4.1.6 (eddf0367) and my controller is a Mateksys F765-WING. Everything seems to work fine but I have a STRG_BAK folder on SD.
Attached sample files
https://drive.google.com/drive/folders/1VZoG0DTrt45KIherm8dirOI0BqgZjWMX?usp=sharing
What do those files mean? How can I solve it?
that is normal, it is a backup of your parameter storage using for diagnostics
I’ve just released plane 4.1.7beta1. The beta will likely be a few days, then we will start on 4.2.0beta releases
- avoid all opening of log files in main thread
- support Benewake CAN Lidars
- improved VTOL navigation shaping code
- Compass custom orientation is never overwritten during calibration
- EKF logging gaps fixed (some messages were occasionally being skipped)
- IMU logging fix for IREG message (records IMU register changes)
- SERVOx_FUNCTION protection to avoid memory overwrite if set too high
- FTP parameter download fix
Happy flying!
4 Likes
The Future Wiki Changes documentation (in Master branch now) mentions RPM2_ESC_MASK.
This parameter does not appear in v4.1.6 despite following the described procedure.
Once complete set RPMx_TYPE to 5 and write the parameters to ArduPilot. Then refresh/fetch the parameters. You will find a number of additional parameters are now available for that instance.
What do I have to do to get RPM2_ESC_MASK to appear?
that parameter will be part of 4.2.x, it is not in 4.1.x. The “Future Wiki Changes” is about the next release, not the current one
If you’d like to try it now then please try running a ‘latest’ firmware or use the custom.ardupilot.org firmware build server
Hi @tridge your view on this please … hopeing your comments to help me.