I am delighted to announce the release of the 4.1.0 stable version of ArduPilot plane!
Note: please be patent as our build server is currently building the new copter 4.1.0rc3, it will be a few hours before the new plane release is available
This is the first stable release of the 4.1.x series for fixed wing. This is a major release, with a huge number of improvements over the 4.0.9 release.
The changes since the last beta (4.1.0beta8) are:
fixed a wind speed initialiation bug that affects planes with no airspeed sensor and no compass
added support for icm42605 on MatekH743
There have in total been over 9000 patches applied since the last major stable release (the 4.0.9 stable release), so listing all of them is not practical, but a few of the highlights are:
USB log download speeds improved on F7 and H7 based boards
Large improvements in EKF stability and support for very long distance flights
new boards QiotekZealotF427, MatekF765-SE, MambaF405v2, KakuteF4Mini, FlywooF745, FlywooF745Nano, BeastF7 and BeastH7
massive improvements to lua scripting, with greatly expanded API
External AHRS support (VectorNav)
support for EKF3 affinity for better sensor redundancy
big improvements to GPS moving baseline yaw support
new fixed wing PID system
major fixed wing autotune update giving much better tuning
added MAN_EXPO_* parameters for input expos in MANUAL, TRAINING and ACRO modes
added ONESHOT_MASK for oneshot output on control surfaces
dupport for bi-directional dshot on many boards
added PiccoloCAN servo support
new quadplane landing approach system, with airbraking
greatly improved tiltrotor support with much improved transition stability
new unified ESC telemetry system for CAN, DShot and serial ESC telemetry
temperature calibration for IMUs, including factory calibration support
much improved notch filtering support, including double-notch and realtime FFT based notch filtering
much faster parameter download and mission upload/down using MAVFTP
switched to new EKF3 as default state estimator with many new features
The 4.1.0 release includes contributions from over 240 developers and changes over 300 thousand lines of code across 2800 files. It has been a mammoth effort from the whole community to bring this new version of ArduPilot which pushes the best open flight controller to whole new levels. A big thank you to everyone who contributed, including the developers, testers and documenters. You should all be very proud of this release!
We are already starting work on 4.2.x, and will of course continue to do point releases to the 4.1.x series to keep everyone up to date with the latest fixes.
Thank you Tridge and all the team who made this possible,it really makes my hobby so much more enjoyable with all the improvements and feature’s you keep adding
Known issue: if the Q_OPTION bit 16, is set disabling the fixed wing approach for QRTL and VTOL_LAND, the Q_RTL_ALT parameter has no effect…ie doing a pure VTOL QRTL will occur at the altitude at which the mode is entered, even if lower than Q_RTL_ALT…this also occurs even if the option bit is not set and the vehicle is within 1.5X the WP_LOITER_RAD or RTL_RADIUS, whichever is bigger. The vehicle will switch to VTOL and proceed at current alt back home.
Solutions are being considered. Not normally an issue if the approach feature is not disabled.
in Stable there is a new default feature that any QRTL/NAV_VTOL_LAND will use a fixed wing approach, see wiki Return to Launch (RTL) — Plane documentation
it works fine, but if you disable it in Q_OPTIONS, then those will transition to VTOL and proceed home at whatever the entry height is, ignoring Q_RTL_ALT…
if you set Q_RTL_OPTION to 1 (not Q_OPTION) then it also will proceed from the VTOL transition point at the radius to home and land, instead of descending along the way to Q_RTL_ALT, and then descending over home
neither of these is a big issue unless you are below Q_RTL_ALT, which is intended to be the safe minimum return height for a QRTL phase
HI, i’m experiencing a minor trouble with the on-board OSD in a matek F765.
Everything have been working ok on 4.0.9. I have multiple OSD screens which i change in flight with a slider on CH 10.
Today i´m trying 4.1.0 and this control does not work anymore. The CH10 its being read perfectly by the controller and i can even change between OSD screens if i change the OSD_SW_METHOD from (1) PWM to (0) RC change.
As far as i see there were been multiple improvement in the OSD, perhaps i missing something new that should i change, but honestly i can´t find the problem.
Any help will be appreciated.
Regards. https://drive.google.com/file/d/1WnHu4PVXYVRQK92dfqDjaxBhBTKlY72u/view?usp=sharing
notice that there is lots of overlap, especially OSD4 covering the entire range. When I fixed your overlap so that each channel has its own range it worked correctly.
I also tested your parameters with 4.0.9 and it behaves badly there too, cycling constantly between screens.
Thanks a lot @tridge, that was it.
I did not see that when i did the update.
After upgrade the OSD4 changed from 0-0 to 900-2100 covering all the range.
I had it like this in 4.0.9:
OSD1_CHAN_MAX,1300
OSD1_CHAN_MIN,900
OSD2_CHAN_MAX,1700
OSD2_CHAN_MIN,1300
OSD3_CHAN_MAX,2100
OSD3_CHAN_MIN,1700
OSD4_CHAN_MAX,0
OSD4_CHAN_MIN,0
When i saw the first layouts the ranges seemed correct, and honestly i did not check the 4th one… my bad.
Thanks again and really sorry for have you bothered with this.
i have set following parameter
Q_RTL_MODE = 1
Q_RTL_ALT = 50
Cruise Air speed = 20 m/s
minimum FBW = 17m/s
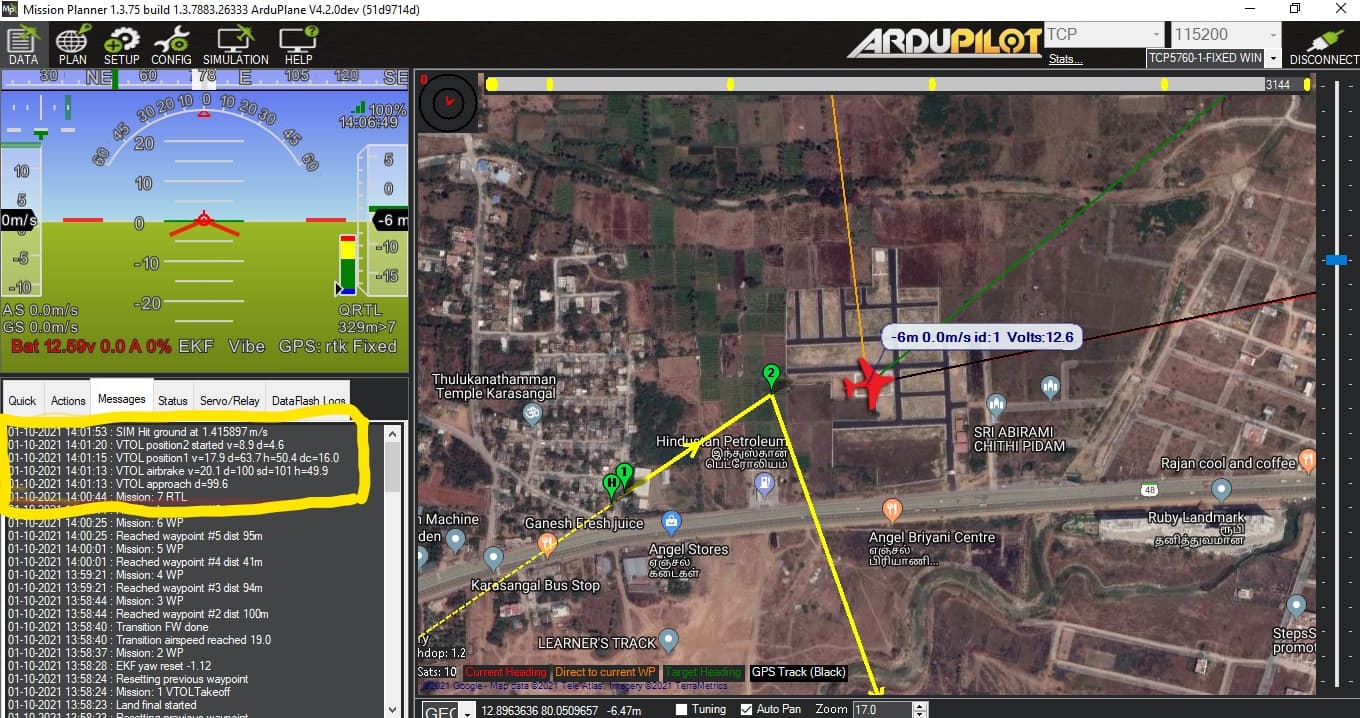
and final waypoint plan was set RTL and Radius Altitude is -80m.
here my doubts from above screen shots is When VTOL approach 100m how is calculated
what those parameters says VTOL airbrake under that there are sub parameters v, d, sd, h
VTOL position 1 where here there are sub parameters like v, d, h, dc.
VTOL position 2 v d only.
what are the different stages during landing. .
after reached landing point also plane keep moving forward for more distance its usual in SITL and in real time will land in land position?
please clear that will help on work with real time and Various models to work with.
i just uploaded it onto my 2.4m VTOL, and had a flight. I also fixed the Pitot sensor as you suggested in the other thread.
It flies beatifully! it looks a little smoother to me, compared to the 4.1 beta6 of last flight. In particular when turning back on horizontal level from an aileron turn, roll movement seems smoother/damped than before, with no rebounce at all. I cannot say if it’s due to some software tweaks or it’s the fixed pitot helping, but that’s it. Parameters are exact same of previous flights, apart enabling airspeed sensor.
Great work! Thanks!