I love this! With the sub-version numbering, Mission Planner/QGroundControl now know that there is categorically a new update and pops up a prompt when I connect to the plane.
Previously they would show multiple updates with the same version number, with nothing to distinguish them.
In this case I know I don’t need this update for what I’m doing. Thanks!
Pitifully, I crashed my quadplane yesterday. I am very interested to discover the causes. The problem occurs in the last part of the landing process. I tried the new QRTL mode 3 (Q_RTL_MODE = 3), with the last firmware 4.1.4. As you know in the new method exists the “airbraking” phase in order to make a fix wing approach.
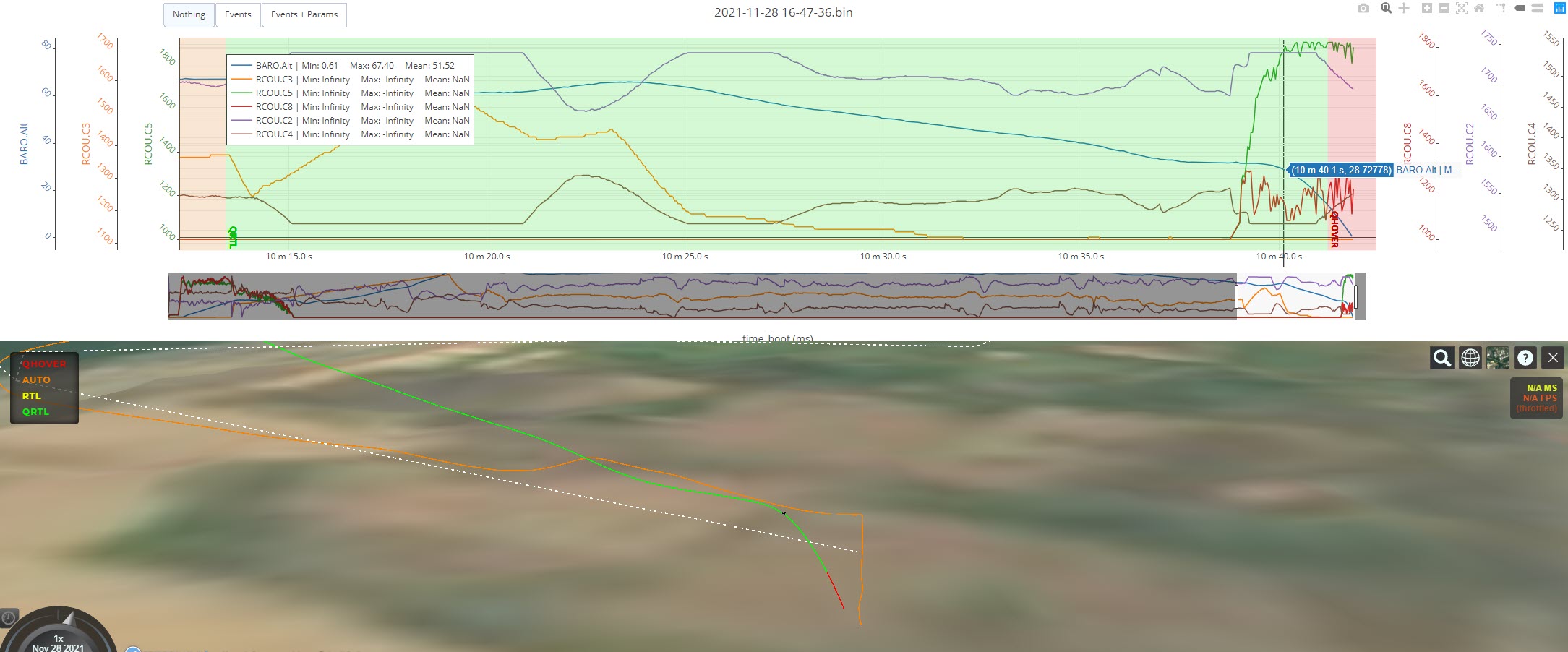
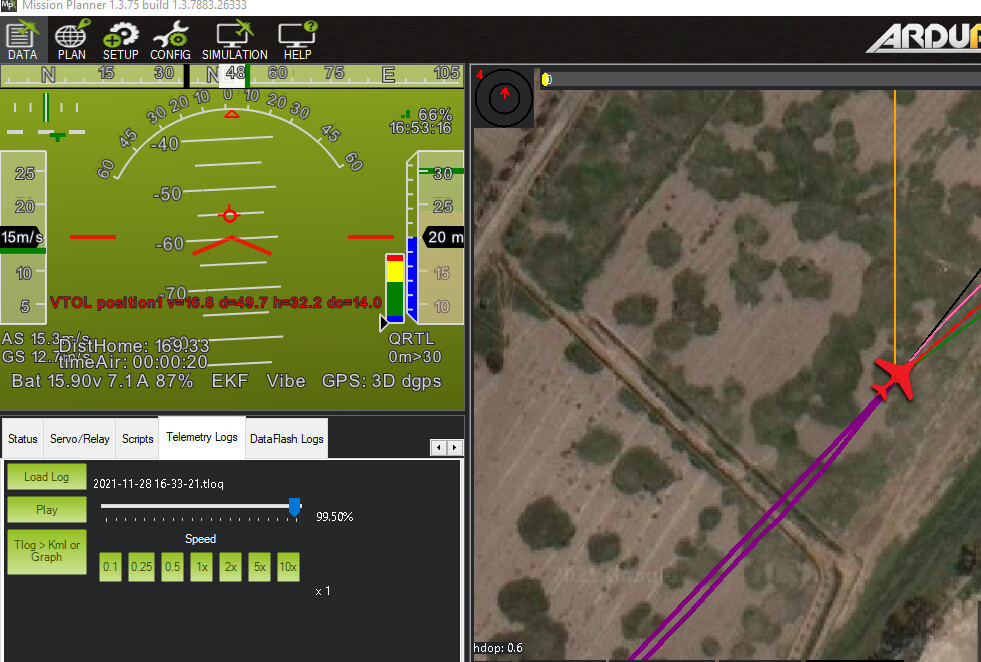
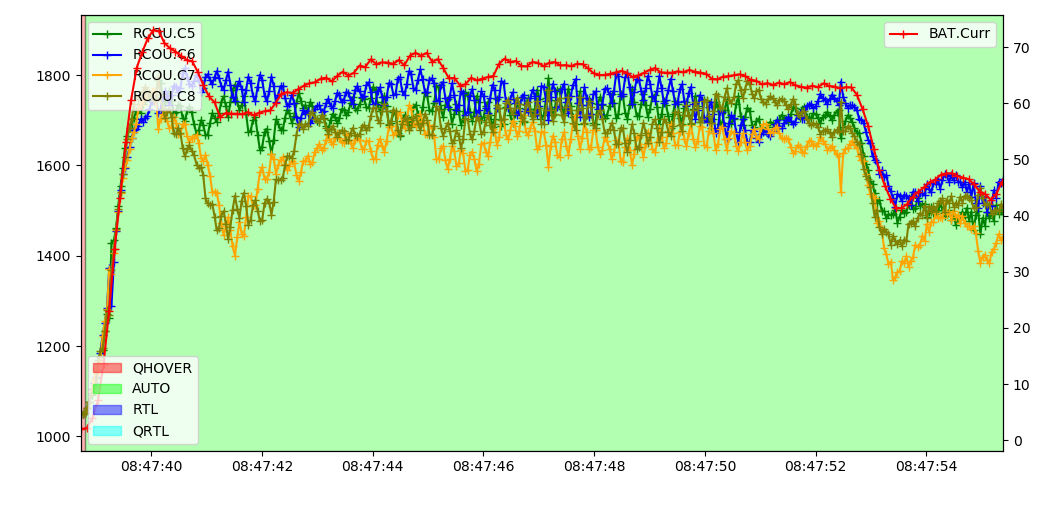
The plane reached to ALT_HOLD_RTL (65) in good shape, made the first “airbrake” to 80m from home and altitude to 34m ( v=18.1 d=80 sd=81 h=33.8), at this moment the forward motor begin to stop. The Q_RTL_ALT parameter was defined at 20m, but the plane maintain an altitude of 30m for a few seconds. The problem occurred when reaching the VTOL POS1 position (v=16.8 d=49.7 h=32.2 dc=14.0); The plane pitch down suddenly. As you see in the next graph the nose was down all the way (behavior channel C2 and C4, Vtail). In the same way, the quad motors were activated, the front ones (channel C5 and C7) push higher in order to do a final “airbraking”, I think. But the inertial was too high and the plane go strain to the ground. I tried to change to QHOVER mode in order to get out manually the situation but was not enough. The plane crash to the ground at 23m/s, the plane is destroyed.
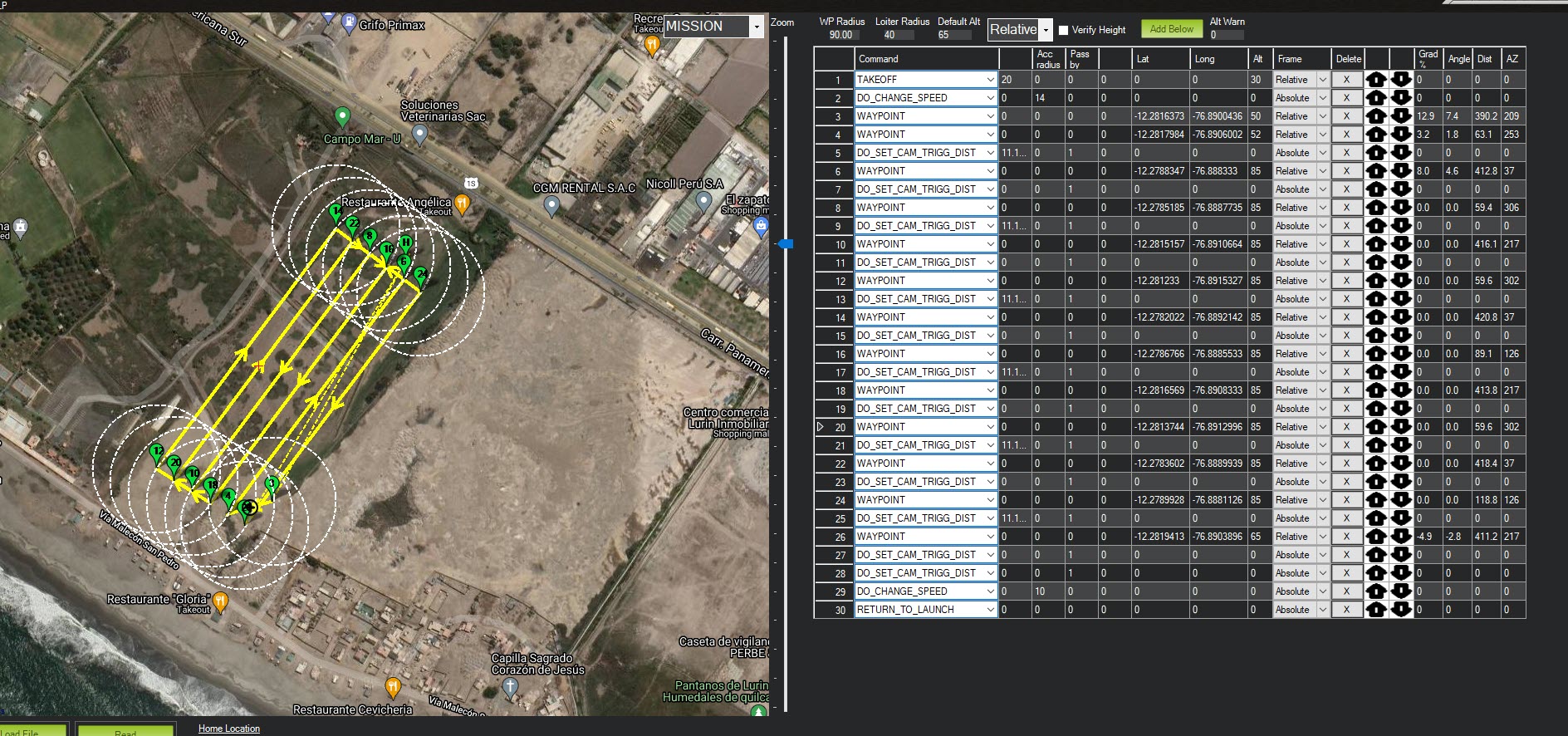
One last detail, when I made the mission I forget to change the command TAKEOFF to VTOL TAKEOFF and RETURN TO LAUNCH to VTOL LAND. The takeoff process was as VTOL, without issues, but the landing was a disaster.
Maybe can improve the Mission builder process, due to VTOL command only being enabled when the quadplane is connecting to MissionPlanner. So, if you work your mission in the office you cannot complete the takeoff and landing part.
Here are my BIN data, hopefully can review it and give me some clue about source of the problem.
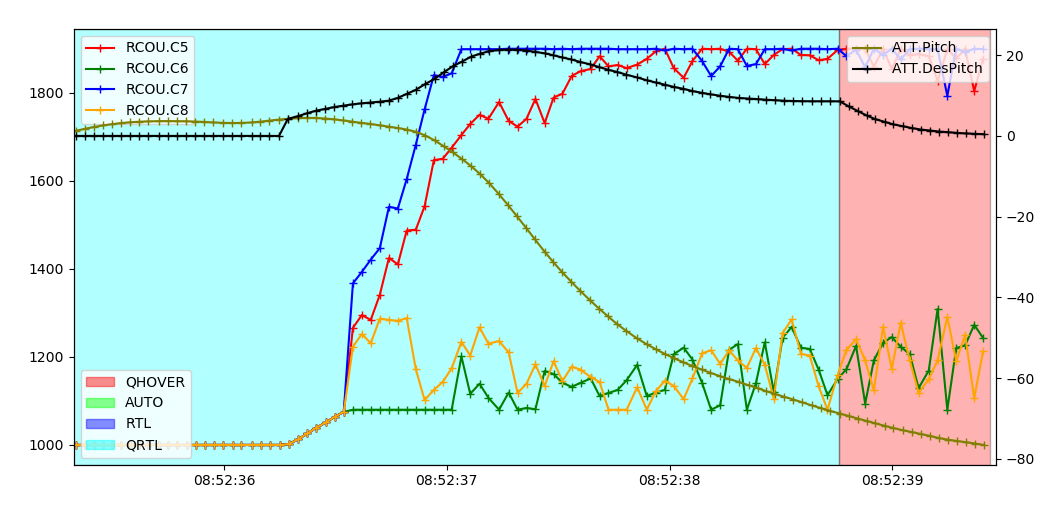
ArduPilot put full throttle on the front two motors, and dropped the rear two motors right down, yet the plane kept going nose down. At that point there is nothing more the autopilot can do, it already has maximum pitch up.
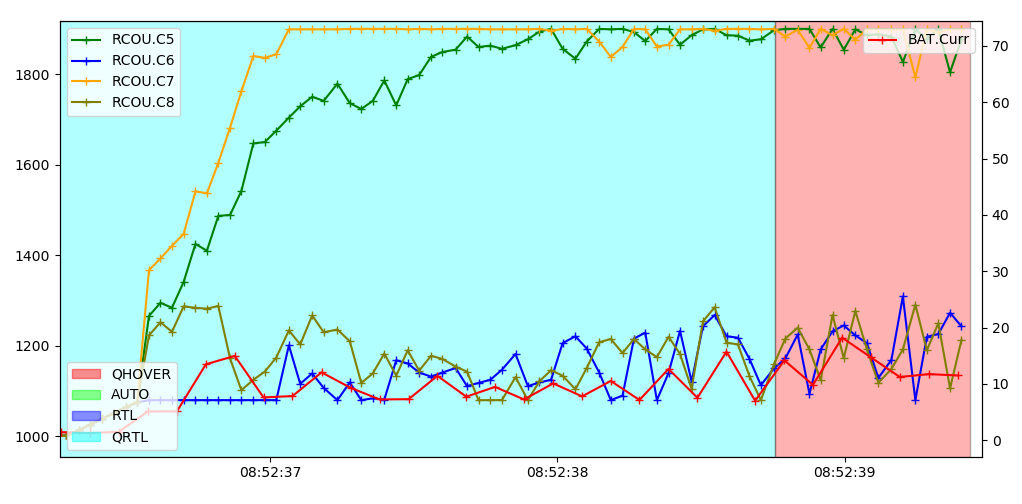
I’m pretty sure your front motors did not spin up on the landing. You can see that from the current draw, comparing the takeoff and the landing.
In the takeoff we can see this:
we have 2 motors at 100% and the current draw is under 10A. That is impossible unless those motors have failed to start up.
All you could have done is to switch to FBWA and try to fly it out as a fixed wing, then try the landing again and hope the front motors spin up properly on the 2nd attempt. I know it is almost impossible to think of doing that quickly when something is going wrong.
One of the things we’re working on is to automate this for aircraft that have ESC telemetry so we know the RPM of the motors. We will have an option to automatically abort the landing and try again if one or more motors don’t spin up correctly.
What type of ESC were in the plane?
I realized that behavior but never thought that quad motors can fail. Never happened that in the past. But It is true that the current consumption is not expected. I am not sure if the Quadmotor started, all was so quick, but the propellers of the front motors were broken, So I thought that they were rotating. About my quadmotor system:
I wonder if the parameter THR_SLEWRATE can affect the response in this state. I used the value 55 in order to reduce the power request from the battery. What do you think?
no, THR_SLEWRATE has no impact at all on VTOL motors.
you definitely had a hw failure of some sort. The PWM values logged as going to the ESCs should have had them spinning the front motors at nearly full throttle.
@tridge can you add a parameter that will disable tuning D when auto-tuning? I found is that on small aircrafts, it seemed to me from D there is more harm than good. Therefore, I would like to check autotune without D
if the " * fixed reset of ground steering lock for landing" is what i think it is (rudder kicking hard on landing approach problem), that is big for me.
i will looking forward to this one becoming “stable” so i can update.
I’ve recently started getting this weird bug where whenever the FC is onboard logging the missionplanner and the yaapu telemetry keep throwing “Bad Compass Health” errors. With the default LOG_BITMASK I can successfully arm, but as soon as I do I start getting “Bad Compass Health” as it begins logging. If I set LOG_BITMASK to 0 then I stop getting the errors. I can even have the plane armed and actively giving the error, and as soon as I write the parameter of LOG_BITMASK to 0 I stop getting the errors. Conversely, if when disarmed I enable LOG_DISARMED I start getting the messages as soon as I write the parameters, and can’t arm so long as LOG_DISARMED is enabled and I’m getting the messages. The real kicker is when I look at the onboard logs afterwards, Mag.health has a value of 1 for the duration of the logs!
I’ve seen this behavior in 4.1.4 and 4.1.5 on a Matek F405-Wing, but only recently started with ardupilot so didn’t get a chance to see if this happened in earlier versions.