Unfortunately after flashing to 4.0.3rc2 fport stop working for me. When I was on latest master it was working good. So I, should return back without logs 
I think the yaapu patch regarding timer initialization should be included in 4.0.3
Unfortunately after flashing to 4.0.3rc2 fport stop working for me. When I was on latest master it was working good. So I, should return back without logs
I think the yaapu patch regarding timer initialization should be included in 4.0.3
yes, I have not included fport in 4.0.3. It is very new code and I am only including changes that we are very sure of in the stable releases
Hi tridge
2x flights from today with 4.0.3b2 - https://drive.google.com/open?id=1RRqffy1aKEkxEGIZf3hBmqlB1HfH1kue
No big issues, both flights were LOS with a Matek F405-Wing on a Wing Wing Z-84.
only issue I’m having is with SERVO_AUTO_TRIM; servo trim from AIL left and right seems to no longer update, now fixed at 1600. any ideas?
Cheers
Charles
There’s my log. It is latest master because I’d no chance to switch from fport back.
There’s FBWA, MANUAL, ATUN, AUTO, GUID flight modes and autonomous landing at the end.
Any recommendations would be appreciated 
It hit the limits of SERVO_AUTO_TRIM. The auto trim won’t go beyond 20% of the throw, which means 1600 max for your servo range. You will need to physically adjust the servos to re-center the elevons.
Looks like it is doing well! Nothing obvious wrong from a quick look at the log
Please let me know when it would be possible to test fport rc firmware.
There’s two issues I’d faced
very good point!  thanks for pointing it out, will re-check all of that… Cheers!
thanks for pointing it out, will re-check all of that… Cheers!
The most important fix is for FrSky pass-through telemetry. Pass through telemetry support had a race condition which could lead to the flight controller generating a fault and rebooting. All uses of FrSky telemetry should update immediately.
Happy flying!
The new “prevent failsafe action from overriding a VTOL land” comes default with this last release or it needs to be activated from a parameter? Thanks.
it is the default behaviour
I’d just tryed all flight modes: fbwb, loiter, cruise, guided, auto and tkoff (dev firmware)
Everything works nice and smooth.
Until my wing was crashed
There’s a sequence of crash…
Had a tip stall in fbwa mode because a slow turn.
Fortunately it was recovered in rtl mode.
Just after recovery I’d switched to auto mode and had a stall again because auto mode made a tight turn but at that moment the speed was pretty low just after recovery. Nothing serious but shit happens
Was STALL_PREVENTION turned on?
There’s no airspeed sensor on the wing
I have a Pixracer R15 from mRobotics
In order to flash arduplane 4.0.3 do I need to do something special or is it Ok if I I do it from mission planner ?
Alcala
Ps : i posted same request in another post but I believe it is more appropriate to do it here
You can flash directly from MissionPlanner
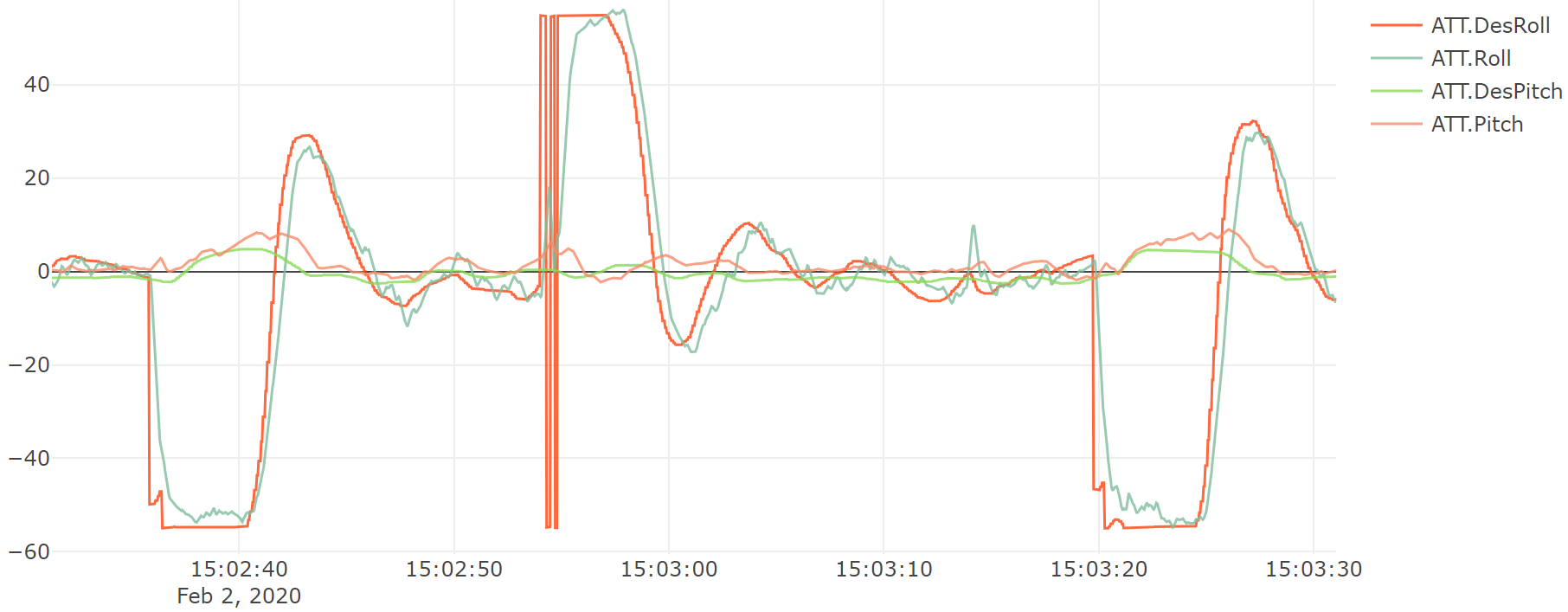
I finally had the chance to test-fly 4.0.3 stable yesterday, and I had a very successful flight. Upon analysis of the logs, I’m not sure I undertand what is driving a roll demand oscillation in the middle of an automatic mission. See the screenshot (red line indication) and attached log below.
it is navigation indecision. The plane was flying south and the next waypoint was to north. It flipped between turning right and left a couple of times. We do have code to prevent this type of indecision but it isn’t perfect, and sometimes we get temporary indecision depending on the yaw rate of the aircraft at the time.
Just tryed fully autonomous flight (no rc control) and it was fully successful!
Much better when I’d try to do a smooth manual landing last time.
The Copter-4.0 re-sync brings in quite a few structural changes. The main user visible changes are:
Due to the significant number of changes with the re-sync I would particularly appreciate as much flight testing as we can get on this release.
Happy flying!